














搜索

作品简介: 本课题利用机器视觉技术与传感器检测技术相结合实现棉花含杂率检测。加工中的棉花通过一个扁平的透明管道进入本检测系统,通过CCD相机拍照,获取含杂棉花的实时图像,并传送给图像处理器进行处理,检测得到图像中棉花所含杂质的面积及杂质率,将结果保存,并传送给控制器,由控制器根据一定的控制策略控制喷气阀等剔除装置,对检测到得杂质超标的棉花进行剔除动作。
作品简介: 机车组合体”顾名思义是飞机和汽车的组合,它既能完成像飞机一样在空中飞行,又能像汽车一样在公路高速行驶,在遇到路面障碍或交通阻塞时该车可以越过障碍继续行驶。

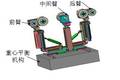
作品简介: 该试验台为双桨固定翼垂直起降无人机的前期准备阶段,试验台采用多自由度旋转机构,可模拟飞机的多种飞行姿态及受力情况。机翼部分搭载于试验台支座上,可实现升降、竖直面内摆动和水平面内旋转多自由度飞行控制。 创新点 1. 采用双桨固定翼机构设计,实现垂直起 降空中悬停等功能 2. 将螺旋桨的高速运动与转角调节的 低速运动相分离。 3.试验台可多自由度旋转
作品简介: “机车组合体”顾名思义是飞机和汽车的组合,它既能完成像飞机一样在空中飞行,又能像汽车一样在公路高速行驶,在遇到路面障碍或交通阻塞时该车可以越过障碍继续行驶。
作品简介: 设计的基本思路是将餐盘整理收纳于与外界相对隔绝的容器内,并且在需要使用时便于使用者自行拿取,同时不对其他未使用的餐具造成二次污染。 关键技术为通过连杆、套筒、齿轮及传送履带等机构实现餐具的收纳盒快捷取用,通过整合负氧离子消毒设备实现餐具的消毒。

作品简介: 飞机有喷气式飞机,同样的船舶也有喷水推进船舶,喷水推进是一种古老的推及方式,喷水推进是一种高效率的推进方式,但是由于推进器的效率低,不容易实现大推力,其发展受到很大的限制,逐渐被螺旋桨推进代替,但是近年来随着喷水推进泵效率的不断提高和性能的不断改善,喷水推进渐渐的崭露头角。我们做的就是一种喷水推进水泵。

作品简介: 解决井下事故发生后瓦斯浓度的监测和图像的采集与传输的问题,以便及时了解矿井情况,搜救被困人员。

作品简介: 本设计是一种模切机的自动上下料机械手,属于气动机器人范畴。该机械手以PLC控制为核心,设置了一种基于负压原理工作的装置,具体地说是主要运用气缸的工作来实现纸板上下料功能的机器。本机械手主要利用气压工作原理,以空气作为工作介质,让气缸驱动吸盘。该装置环保,低成本,能耗低,性能好,自动化程度高,可使人从低级的、重复性劳动中解脱出来,更能代替人力在危险的环境中工作。
作品简介: 通过理论研究及实验我们设计并制作了一台带有全地形救援车,应用于矿难,地震、隧道塌方等事故灾害的搜索救援工作当中。机器人主要由以下几个模块构成:被动式越障模块,导航模块,机械手模块。通过以上三个模块的组合,机器人可自主在矿难,地震之后的复杂地形中进行搜索并救援。

作品简介: 在蔬菜栽培生产中,真菌、细菌、病毒引起的多种蔬菜病害主要通过化学药物进行防治,导致蔬菜中化学药物残留过高,引发食物中毒,严重危害人们的身体健康。蔬菜病害诊治系统利用太阳能光伏板提供的能源,利用病症颜色识别和监控系统,通过电子制冷系统使变频高压产生的活氧在低温状态下溶于水,利用一定浓度的活氧水,进行蔬菜病害的诊断与防治,替代了具有药物残留的化学农药,是生产无药物残留、绿色优质蔬菜的理想设备。

作品简介: 本作品——全自动大蒜播种机是一款农业机械,主要用于实现大蒜的自动播种工作,有助于提高大蒜种植的生产效率。比传统的手工播种效率提升8-10倍。

作品简介: 本项目旨在设计制作完成医院病房巡视机器人一台,能够满足医院病房复杂环境下的日常巡护任务。护士通过远程PC机或机载PC机上的简单手动或语音操作,即可指示机器人进行某个病房或多个病房的巡视任务。记录病人生理指标和仪器的监护数据,以图像形式传输到远程PC机上。远程PC机上能够实时显示机器人的运动状态,并能对机器人进行实时控制。能够按照护士指令,捕获病人行为和表情,以便于护士对病人异常行为检测。
作品简介: 通过GPRS技术将家庭,工厂以及其他场所的电器,监视仪器,计费仪器等电子产品与用户的手机终端联系起来,ARM控制器采集家庭信息、家居付费信息、安防等信息并上传至网络服务器,用户通过手机GPRS网络或PC机上网功能实时交互服务器信息,以此通知用户,能达到报警、自控制、可使用户能够异地操作。将电器产品与个人PC机相连,PC机可单独访问该用户界面,达到智能化的系统控制。是家居物联网的体现。

作品简介: 为方便准确测定玉米茎秆的强度特性,本实验设计了一种便携式玉米茎秆强度测定仪。该仪器以STM32单片机为核心组成嵌入式控制平台,由拉/压力传感器采集压力信号,压力曲线等结果可实时显示或SD卡储存。
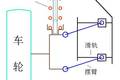
作品简介: 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。

作品简介: 本作品以含水体超前定位和水量估算为核心目标,以仪器设备和软件研发为核心内容,以物理模型试验和数值正演反演方法为研究手段,建立复合式激电法在隧道中的工作方式,突破基于频域激电参数、视电阻率参数和时域激电参数的含水体异常实时识别技术,提出基于三维反演成像技术的含水体超前定位方法,致力于研发出一套水量估算软件,最终建立基于复合式激电法的隧道含水体实时超前预报、三维定位与水量估算方法技术体系。

作品简介: 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。

作品简介: 本装置以主从式区域纵联比较保护方案为研究对象,以分布式电源(DG)接入配网后的故障检测与隔离算法为基础,同时兼顾考虑配网结构发生变化和系统信息不完备情况下的修正算法,构建出实现主从区域纵联方案的软件和硬件方案,并以事物的形式呈现

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 该电动机保护器改变了传统保护器安装模式,采用分立的LMK互感器,不受控制柜容积等条件的制约,通过LM324四运放独立的比较分析,可靠的对电动机的断相、过流进行保护,与智能型保护器相比,本产品价格相对低廉,且能满足基本的保护功能。对于一般的电动机的保护,其实用性很强。
