














搜索
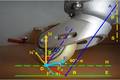
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

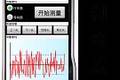
作品简介: 本作品设计了一款基于机电智能控制系统的小型便携式安全活门组件装配检测装置。颠覆了传统基于液压系统的测试方法,实现军用飞机上微压差安全活门打开压力、活门开度及工作温度的精确测量。具有精度高、体积小、结构简单、人机交互性及便携性好等优点。针对不同型号安全活门,经过匹配的工装设计后,可把本装置的装配检测技术广泛应用到航天、船舶、汽车等其它军用、民用领域。

作品简介: 乙烯裂解炉是乙烯装置的龙头和耗能大户,其操作好坏对装置能耗及后序单元的运行起着关键作用。本项目利用极点配置技术及仿人智能控制技术,开发出炉管温度高级控制系统、炉管支路出口温度平衡控制系统及总进料流量提降量控制系统,设计了先控与常规控制的安全切换逻辑,大大增强了裂解炉的抗干扰能力,提高了乙烯、丙烯收率,减少了炉管结焦,延长了炉子的运行周期,减轻了操作员劳动强度,实现了提高效益,节能降耗的目标。

作品简介: 该项目研制出了CPPM外转子混合励磁风力同步发电机样机,并把该样机运用于中小功率离网型发电系统中。 该发电机与同类产品相比具有如下优点: 1.无刷无滑环结构,可靠性高; 2.宽风速范围内电压调节,效率高; 3.外转子结构可使其用增速器增速,减小发电 机体积和重量。

作品简介: 针对油田注汽锅炉炉管过热引起爆管问题开发了油田注汽锅炉爆管预警装置。该装置能够准确判断炉管或管内蒸汽是否过热,并对过热及时发出预警。其基本原理是测得注汽锅炉蒸汽的压力,分析得出该压力下对应的饱和温度,与实测温度作比较;当实测温度高于压力对应的饱和温度时,说明水蒸气已经过热,装置发出报警。

作品简介: 齿轮传动在现代动力传动系统中占据相当重要的地位,但是现有的齿轮基本都是依靠直接接触啮合进行能量传输的,存在效率低、噪音大、需润滑、大变比场合需要多级变速的缺陷。根据磁通总是力图通过磁阻最小路径的原理,参考磁阻电机转矩产生特点,我们提出了一种非接触式大变比磁性齿轮拓扑结构。该结构是以我们独创的转矩星理论为基础,属国际首创。该结构具有磁体利用率高、传动比大、效率高、噪声小、易维护、使用寿命长等特点。

作品简介: 该作品以小型、离岸式的波浪能发电装置为设计目标,为海洋浮标等海洋观测设备长时间持续供电。设计的振荡浮子式波浪能发电装置使用了一对棘轮式离合器,使装置在波浪上下运动的过程中都能使输出轴朝一个方向旋转,实现了全波输出,从而提高了发电效率。

作品简介: 本设计应用Altera公司的CycloneII系列芯片基于NiosⅡ嵌入式处理器的SOPC技术,设计完成了双踪函数信号发生器系统。信号发生器基于DDS原理以及结合Nios软核作为外围和数据控制器,单片FPGA芯片实现高精度、高频率的双通道各信号源的产生,并较全面的利用了Quartus和NiosIDE的设计方法。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。
作品简介: 平整度的检测是铁路焊轨厂在生产高速路轨作业中必需的一道工位,以满足高铁运行的安全性和舒适性。通过对焊轨厂生产过程的调研,分析目前各种检测方法和手段,以微处理器作为控制核心,结合步进控制技术、计算机控制技术、无线通讯技术、传感检测技术,完成钢轨轨道焊头平直度的检测、数据显示及保存,以人机交互形式实现长物体表面平直度轨迹等特征参数监控。

作品简介: 蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。

作品简介: 本作品旨在针对手部中风患者和肌肉衰退老年人,研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,动作量化、精准,自动运行、可观测,并建立数据库,在患者的个体差异性问题上,进行有针对性的治疗,也为医生提供全面、定量化的分析依据,促进康复医学的发展。

作品简介: 本作品实现对2.4GHz、780MHz以及433MHz频段数据同时进行检测。通过Ethernet传到被测物联网的监控服务中心,并结合自主开发的协议分析软件对所采集的数据报文进行完整的协议解析。

作品简介: 本课题组研究并设计了一种基于直-9系列直升机的应急逃生系统。当直升机遇到紧急情况,须弃机逃生时,飞行员启动本装置,通过抛舱门-固定人、弹座椅、弹射伞、速开伞等过程实现安全着陆。系统的主要组成为:舱门定向抛离模块、座椅弹射模块、射伞模块、快速开伞模块、人-椅固定与分离模块等。该项目首次提出了将侧面双向弹射与迅速开伞有机结合的直升机逃生系统设计思路,填补了单旋翼和双旋翼均适用的直升机逃生系统研究空白。
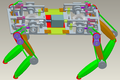
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。

作品简介: 本系统由微处理器、无线通信系统、键盘、显示器、温度传感器及人工控制台构成。工作时,下位机将数据打包并通过无线通信系统将数据包发送给上位机,上位机将数据拆分后分离提取出各项数据,进行分析判定并显示。上位机将数据和指令打包后通过无线通信系统发送给下位机装置,下位机中的微处理器对数据包进行拆分,并提取出相应指令和数据,再将指令和数据传递给PLC,由PLC还原给工业现场。微处理器通过串口与通信系统相连接。

作品简介: 涌突水是地下工程的主要地质灾害之一。实践表明,注浆方法是涌突水封堵治理的有效技术手段。但是动水注浆理论尚不成熟,尤其是裂隙动水条件下浆液扩散和封堵机理研究不足。针对上述问题,研发了准三维裂隙动水注浆模型试验台,经过试验分析,首次提出水泥浆液的U形扩散规律和分层分区扩散机制,得到浆液的快速析水沉积原理和沉积留核扩散规律。在此基础上,形成了以浆水比为核心控制因素的裂隙涌水注浆封堵新方法。

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。

作品简介: 项目是由ICPF材料驱动的超微型仿生机器鱼,可由3V低电压驱动,具有体积小、无噪音、无水分解、成本低、生物亲和力很强等特点。作品对毫、厘米级水下微型仿生机器人的设计方法和控制方式进行研究,进行了运动和动力学建模。使用ICPF低电压“生物型”驱动器作为仿生机器鱼的动力装置,通过内置控制电路和微传感器实现了基于反馈控制的水下三自由度游动、避障、主从通讯及鱼群信息交互。在各领域具有广阔应用前景。

作品简介: 本作品设计了一种集海洋风能与波浪能开发于一体的浮海型混合发电系统。采用模块化设计思想,立轴风力发电装置与波浪发电装置设计成可独立运行的模块。立轴风力发电模块与波浪发电模块安装在浮体平台上,通过锚泊浮于工作海域。本作品走多能互补道路,实现了风能和波浪能的综合利用。
