














搜索

作品简介: 本项目设计一种钢丝绳芯胶带中钢丝绳阵列的无损检测装置。钢丝绳芯传输机,是在矿山企业中用来运输煤矿、矿石等物料的大型运输设备,胶带是其关键部件,胶带由外层的硫化橡胶和内部钢丝绳阵列组成。当内部钢丝绳出现断绳等缺陷时,胶带承载力下降,容易产生安全事故。本项目设计的装置采用漏磁检测方法,检测有缺陷的钢丝绳,用电路进行数据处理,计算机软件显示和控制。

作品简介: 立体车库的出现会解决现今汽车的存放的问题,在同一面积上存放更多的汽车,现在道路上的汽车的越来越多,汽车存放问题日益严重,所以立体车库的出现会大大缓解这一现象,而且我们的全自动立体车库更加信息化与网络化,如可以提前与车库系统连接,直接发送命令。车库会自动把车送出来,将会更加方便。

作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。

作品简介: 本作品是对多轴重型车辆转向控制领域一种全新的探索,应用Watt-II型六连杆多级耦合机构组成多轴转向系统,使重型车辆在满足阿克曼转向原理情况下实现全轮同时转向,增强了多轴重型车辆的机动性、小场地转向灵活性与操作稳定性。并将多级六连杆全轮转向系统与全轮驱动、独立悬挂技术良好结合,实现了多轴车辆集全轮驱动、全轮转向、独立避震于一身的发展趋势。
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。

作品简介: 为提高飞机挂载导弹的作业效率,本作品应用图像处理、自动控制、机械制造等技术设计并实现了一个基于机器视觉的辅助挂弹系统的仿真实体模型,可准确高效地完成机翼下多个导弹的挂载任务。系统采用视觉信息识别方法实现多组导弹挂架识别和定位;采用自动控制方法控制挂弹机械装置托举导弹到指定挂架位置;完成挂架任务后,通过无线通信模块自动更新挂弹状态,管理系统完成监控和查询所有挂弹装置的工作状态和挂弹信息的任务。

作品简介: 针对目前的控制实验系统存在局限性,本项目小组设计并开发了一种新型的控制实验系统,此系统弥补了现有控制实验系统中,控制软件开放程度不高、操作不够人性化、网络化实验平台的支持不足以及难于实现复杂控制算法实验等问题,具有广阔的应用前景和良好的社会效益。

作品简介: 本作品是一种小型独立安装的综合空气检测仪,采用太阳能市电互补、太阳能追踪、GPRS/GSM无线通讯,上位机软件等技术。可实现数据独立显示、数据无线传输和大规模联网检测以及远程控制等功能,能对大气的多个空气质量要素进行检测和实时新闻播报。在微控方面采用ARM单片机进行模块化处理,可以模块插接式增减。在传感器的使用方面利用了两个空气采集室,与当前传感器技术比较,使用寿命更长,准确性更好,适用范围更广。

作品简介: 这款无线电能传输装置,它应用了大功率高频传输线共振变压器(放大发射机)技术与耦合强磁共振原理,具有广阔的应用前景。军事上可以拯救低轨道军用侦察卫星,给星际空间的探索器供电,在空间建立超大尺寸反射镜,用于反射大功率微波。民用上可以给一些难以假设线路或危险的地区供应电能,解决地面太阳能电站、水电站、风力电站、原子能电站的电能输送问题。
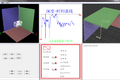
作品简介: 本作品旨在研制一种利用水声遥控方式控制的水下机器人验证机,该技术涉及到多学科领域。水声遥控系统采用性能优异的水声信道编码技术,使得水声遥控可靠性得到显著提高。通过所建立的动力分配数学模型,控制8个推进器电机的旋转方向和旋转速度。在人工操控条件下控制验证机的姿态和运动,使载体更加适应机器人水下作业。

作品简介: 此设备由柴油机提供动力源。通过带传动,齿轮传动带动刀具轴运动,完成清除冰雪的功能。此设备的创新之处在于:1.除雪破冰的刀具是通过其离心力的作用达到清除冰雪并具有一定的避障功能;2.刀具清理下来的冰雪通过后面的滚刷将其扫到路的一侧;3.刀具是铰链连接,具有一定的回旋功能,若路面有凸起,则刀具将反向运动,并且刷子的刷毛为钢丝的,能减少对路面的损伤及降低更新速度。

作品简介: 在消防现场存在着爆炸、有害气体泄露、建筑坍塌及核辐射等众多不安全因素,该作品主要用来解决在如此复杂环境中消防人员亲临火场时的人身安全问题。消防机器人的开发应用可以让消防人员不进入火场,通过消防机器人的自主灭火或消防人员的远程控制即可扑灭火灾。通过将自动控制、人工智能等的综合运用,该机器人实现了自动巡检、报警、灭火等功能,同时又可起到火灾预警功效,防止火灾的进一步扩大,降火灾损失降低到最低。

作品简介: 无骨架充气膜帐篷的帐篷主体包括篷顶和侧壁,帐篷的篷顶或侧壁为全封闭充气膜,在全封闭充气膜内腔的内、外膜内表面之间固定连接有牵引带,并在全封闭充气膜内侧或外侧设有充气嘴,在全封闭充气膜的边缘处设有固定机构,同时设有入口及门和/或通风窗口及窗户。

作品简介: 近年来,无人飞行器的垂直起降和悬停能力越来越受到关注,是实用化无人飞行器研究的热点,近年来研制出了多种新型布局飞行器,基于科恩达效应的飞行器就是其中的一例。本文在充分借鉴已有同类科恩达效应飞行器设计经验的基础上,以吹风实验结果为主要参考依据,提出了基于共轴反桨动力系统和开口式舵面的设计方案,开展了气动、结构、控制等方面的设计工作,并制作和试飞成功了验证飞行器,对各项设计指标进行了有效的验证。

作品简介: 高清晰度工业排管缺陷无损检测系统是一套利用漏磁检测原理制作的无损检测设备,是针对工业排管管道的运行环境和缺陷特征,研究管壁内外表面局部缺陷和壁厚大面积腐蚀减薄缺陷的定量无损检测方法而设计开发的一套数字化无损检测装备,从而实现对管壁缺陷的快速普查和定量评价,保证管道的安全经济运行。

作品简介: 高档小提琴共鸣箱面板和底板的加工都是采用传统手工制作,缺乏必要的理论指导,出精品很难。 本作品借鉴机械系统动态特性试验方法,对共鸣箱的振动特性进行试验分析,其结果将为小提琴手工制作提供一种方便的参考依据。通过测试共鸣箱面板各点的点阻抗值,再绘制出面板的等刚度曲线或图像,以反映共鸣箱面板的点刚度分布状况。制作者可以在制作过程中通过与高品质小提琴的等刚度图像比较,及时地改进和优化共鸣箱的制作过程。

作品简介: 在道路拥堵时,车身折叠上升,驾驶员视野开阔,缓解交通拥堵状况。折叠后小巧车身方便停车,在开阔的路况车身伸展下降,较小的风阻,高速行驶。碰撞时车身折叠吸能,保证驾驶员安全。 四轮独立轮毂电机,车身任意方向移动,在停车位狭小时,侧向入库一次到位,节省时间空间。 头盔式车门节省车身侧向空间,驾驶员可方便轻松地上下车。 电力驱动,无污染,低噪声,人性化。

作品简介: 纬编织物质量视觉在线检测系统综合机器视觉检测、视觉驱动技术,以自动化代逐件检测的方式替现有的人工抽检测,实现了对织物横纵密度的智能检测,对各种测量参数进行了量化,系统的总精度小于1%。

作品简介: 我组设计制造的高楼往复逃生器采用2K-H减速机构,利用离心力的作用使摩擦块甩出与摩擦盘摩擦,达到减速的目的。由于机构较大的减速比,受困人员可以安全的下降;同时,利用吸盘式直流电磁铁吸引穿有绳子的横轴,通过使横轴移动一定距离卡住绳子来实现刹车,而控制电磁铁通断电是通过无线电遥控器来实现,同时设置了多个遥控器,可以实现多地的智能控制。本作品具有质量轻、体积小、方便安装,功能全面等特点,市场前景广阔。

作品简介: 借鉴人工除冰的方法,我们巧妙地运用凸轮机构压缩弹簧,利用弹簧释放的能量带动击冰锤实现对覆冰的敲打,对于残余的覆冰再运用碾轮碾压的方式来除尽。我们的作品采用同步轮传动,橡胶滑轮行走,直流伺服电机驱动和无线遥控控制的形式,可远程控制除冰机的前进、后退以及加减速,从而尽可能的减少高空作业的危险性并增强机器工作的可靠性。
