














基本信息
- 项目名称:
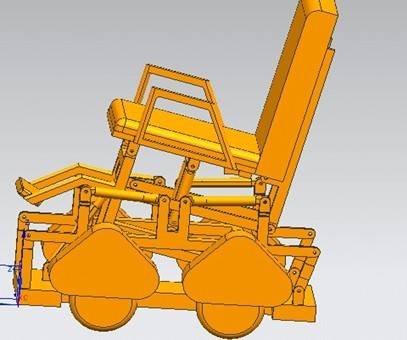
- 多功能水平载人椅
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 在我国,伤残人口众多,并且随着逐步进入老龄化高峰期,老年人口也将越来越多,他们的行走,上下楼梯,甚至站立都需要在他人的帮助下完成,这无疑会给当今高节奏的社会带来很大负担。 正是在此情况下,我们研究了现阶段智能轮椅的技术缺陷,并且在安全性、舒适性、廉价性方面做了有效尝试,提出设计一种结构简单,造价低廉,上下楼梯平稳,可以辅助站立,并且能够在上下楼梯的过程中,始终保持座椅水平的多功能水平载人椅。
- 详细介绍:
- 在我国,伤残人口数目众多,并且随着我国逐步进入人口老龄化高峰期,老年人口的数量也将越来越庞大,他们的行走,上下楼梯,甚至站立都需要在他人的帮助下完成,这无疑会给当今高节奏的社会带来很大负担。 这就让我们想到,他们的主要代步工具——轮椅,还存在着很大的局限性。平房被楼房所代替,众多的老年人及残疾人上下楼遇到了很大的困难。 正是在此情况下,我们研究了现阶段智能轮椅的技术缺陷,并且在安全性、舒适性、廉价性方面做了有效尝试,提出了设计一种结构简单,造价低廉,上下楼梯平稳,可以帮助站立,并且能够在上下楼梯的过程中,始终保持座椅水平的多功能水平载人椅。在研究过程中,我们采用三维数字化设计软件UG对其进行建模和装配,利用机械分析软件ADAMS对其进行运动学及动力学分析,研究了轮椅在各种运动状况下的角加速度对使用者舒适度的影响及线性推杆在各姿态下的受力状况,并利用ADAMS提供的优化功能对其分别进行了运动学和动力学分析,对机构进行优化;以角加速度最大值的最小化作为优化目标函数进行运动学优化,以线性推杆受力的最大值最小化作为动力学优化目标函数,得到满足设计要求的机构最佳参数最终,设计满足使用要求的多功能水平载人椅。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 发明目的: 针对当今社会伤残人士和老年人口众多,而城市化进程的加快,越来越多的平房被楼房代替,他们在行走、站立、上下楼梯时,遇到了很大的不便,我们正是立足于社会需要,响应“十二五”规划的要求,关爱老年人和残疾人等弱势群体。 基本思路: (1)通过线性推杆与电子传感器的配合,使得水平载人椅在上下楼梯过程中始终维持水平。 (2) 通过平行四边形结构与线性推杆的组合,可在一定的角度范围内辅助使用者站立。 创新点: (3)采用履带轮加轮子的组合方式,在平地行进时,采用轮子;在上下楼梯的时候,采用履带轮的方式。 创新点: (1)基于五杆机构的可自动维持水平的载人椅。 (2)利用履带轮机构作为行进装置使载人椅上下楼梯。 (3)可实现自动上下楼梯与辅助站立的多功能水平载人椅。
科学性、先进性
- 科学性 (1) 运用UG,对项目方案进行了建模,并在建模的基础上,进行了修改项目后期,又运用UG对水平载人椅进行了动画演示。 (2) 运动ADAMS软件,进行了力分析,运动分析,动力分析,理论分析和计算,并对其进行运动学及动力学分析及优化,以角加速度最大值的最小化作为优化目标函数进行运动学优化,以线性推杆受力的最大值最小化作为动力学优化目标函数,得到满足设计要求的最佳机构参数,并最终制造样机。 先进性 (1)在确认研究项目的时候,我们通过了教育部查新工作站(Z14),在国内外公开发表的文献中检索,查新报告中摘要:未见与该委托查新课题类似的基于五杆机构的可自动维持水平的,采用轮子加履带轮(左右各两个,共四个独立的履带轮)的组合形式(在平地行走使用轮子,上下楼梯时,使用履带轮),能够实现地面行走、上下楼梯、辅助站立的多功能水平载人椅的研究。 (2) 作品立足于社会需要,响应“十二五”规划的要求,关爱老年人和残疾人等弱势群体,具有广泛的社会意义。
获奖情况及鉴定结果
- 无
作品所处阶段
- 加工制作调试阶段
技术转让方式
- 专利
作品可展示的形式
- 图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 优势:较国内外现有载人椅,在实现相同功能时,价格较为低廉;能够自动维持水平,安全性高;能够实现辅助站立和上下楼梯功能的一体化; 使用范围:伤残人士及腿脚不便的老年人口; 市场前景:作品立足于社会需要,响应“十二五”规划的要求,关爱老年人和残疾人等弱势群体,具有广泛的社会意义;同时,随着伤残人口和老年人口数量的增加,以及城市化进程的加快,帮助他们行走、站立、上下楼梯成了很大的困难,该作品能够实现这三种功能一体化,减轻了年青人的负担。 经济效益预测:功能齐全,受益群体广泛,有良好的市场前景。
同类课题研究水平概述
- 1. 变形履带轮椅机器人的张紧力最优估计和越障能力分析 2. 基于人机工程学的爬楼梯轮椅的设计 3 一种平地、楼梯两用助行装置的建模与设计 4 Stair-climbing wheelchair, has connection end installed with pulling spring, pedrail installed between upper and lower chain wheels, and lower movable supporting rod installed with lower fixed shaft 5 Barrier-free automatic track wheelchair for use by patients, has two suites of independent walking mechanism located at two sides of chassis, motor powered by accumulator, and supporting wheel provided at back end of buffering bracket 文献1针对一种新型变形履带机构的轮椅机器人,采用模糊决策算法,提出了一种动态确定履带张紧力大小的最优估计算法,结合张紧力最优估计算法结果对轮椅机器人上楼梯起始阶段进行了静力学建模和仿真。 文献2针对轮椅在宜人性和适用性方面存在的问题,应用人机工程学理论设计了能爬楼梯的多功能轮椅。多功能轮椅的关键部件中主要以机架、座椅、靠背、坐垫的设计来考虑人机工程学在机械设计中的应用,采用了SolidWorks软件进行三维实体造型。 文献3给出了一种平地、楼梯两用助行装置方案,并以虚拟样机这一重要机械建模技术为依托,完成了装置的虚拟样机建模、运动学分析以及机电控制系统的联合仿真。采用连杆、车轮混合式爬楼机构,上下楼梯时车体始终水平,乘坐者面向行进方向。平地行驶采用后轮驱动,爬楼机构负责装置攀爬越障,连杆机构负责调整车体姿态。 文献4设计了一种星形爬楼梯轮椅,上、下轴及链轮由导杆及履带连接。 文献5设计了一种拥有两个独立行走机构的爬楼轮椅,由一个缓冲装置,一个倾斜装置,一个放在底盘的起重装置组成。








