














基本信息
- 项目名称:
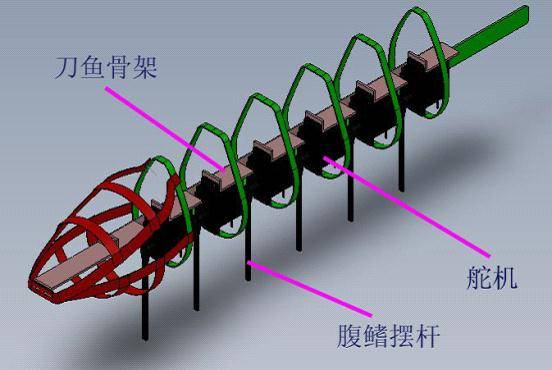
- 仿生刀鱼
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 鱼类运动具有推进效率高、机动性强、对环境扰动小等优点。本设计主要是研究刀鱼长鳍扭转行波推进方式,本设计的机器刀鱼的推进与机动主要依靠腹鳍的扭转行波来实现,通过改变行波传播方向可灵活地实现后退。
- 详细介绍:
- 仿生刀鱼由于在运动过程中,身体保持不动,仅依靠腹鳍运动获得推进力,使得内部空间较其他仿生鱼大,可以搭载不同的探测器用于不同目的的探测。相对于螺旋桨驱动的水下探测器来说,仿生刀鱼环境扰动小,可以在水草密布的环境下自由活动,为水下复杂环境下的探测提供了一种新方式。 应用前景:(1)用于监测江河湖泊中的水文情况 在机器刀鱼配备上不同的化学传感器,它能够在水中游数小时,机器鱼用以监测其在位置的水质(如污染物质种类及多少),机器鱼通过无线电发射装置将所测数据发送给监测中心,从而得到各个区域的水文情况。(2)用于渔业辅助捕鱼 在机器刀鱼身上配上特定的声波发生器,指引鱼群的位置。运用这种方式可以方便、低成本的进行捕鱼。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 鱼类运动具有推进效率高、机动性强、对环境扰动小等优点。本设计主要是研究刀鱼长鳍扭转行波推进方式,本设计的机器刀鱼的推进与机动主要依靠腹鳍的扭转行波来实现,通过改变行波传播方向可灵活地实现后退。 创新点:机器刀鱼依靠腹鳍行波实现推进运动。 技术关键:研究腹鳍行波波动速度与行进速度的联系及波动方式与运动方式的关系,由于是6个舵机驱动,推进力大。 技术指标:运动速度≥5m/min;续航时间≥5h。
科学性、先进性
- 目前研究者的工作大都集中在对鱼体尾部及尾鳍摆动推进方式的研究上,这种机器鱼具有一个刚性的前半身和一个可以摆动的尾部及尾鳍 ,活动的关节不是很多,制作及控制较为方便。综观国内外机器鱼研究的现状,可以看到已有的研究工作多数集中在以身体尾部及尾鳍的摆动推进模式。本设计采用的是腹鳍行波波动行进,这种行进方式与传统的行进方式相比,主要优势是可控性好,内部空间大,可搭载较多的探测设备。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 技术入股
作品可展示的形式
- 实物、产品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 仿生刀鱼由于在运动过程中,身体保持不动,仅依靠腹鳍运动获得推进力,使得内部空间较其他仿生鱼大,可以搭载不同的探测器用于不同目的的探测。相对于螺旋桨驱动的水下探测器来说,仿生刀鱼环境扰动小,可以在水草密布的环境下自由活动,为水下复杂环境下的探测提供了一种新方式。 应用前景:(1)用于监测江河湖泊中的水文情况 在机器刀鱼配备上不同的化学传感器,它能够在水中游数小时,机器鱼用以监测其在位置的水质(如污染物质种类及多少),机器鱼通过无线电发射装置将所测数据发送给监测中心,从而得到各个区域的水文情况。(2)用于渔业辅助捕鱼 在机器刀鱼身上配上特定的声波发生器,指引鱼群的位置。运用这种方式可以方便、低成本的进行捕鱼。
同类课题研究水平概述
- 近年来,有关鱼类推进机理的研究引起了国内外越来越多的研究者的重视。在理论方面,1970年,LighthillE提出了用于分析修科推进模式的“细长体理论”;1977年,Chopra& Kambe 提出了用于大摆幅、月牙形尾鳍推进的“二维抗力理论”;1984年,Videler& Hess 针对与体长相比其左右摆幅较小的鱼类提出了“薄板理论”;1991年,童秉纲院士的研究组将二维波动板理论发展为三维波动板理论;2000年,Triantafyllou等对以身体及尾鳍摆动方式游动的鱼类的水动力学理论和实验研究工作,作了较全面的综述。实验方面,1997年,Miiller等 用DPIV流动显示了直线前进的鲻科鱼身体周围的速度场,尾部显示出存在涡旋结构;l999年,Wolfgang等研究了转弯调头时附体涡,以及尾涡的控制作用,身体由曲变直时尾部形成一股射流;同年,Barret等研究了鱼体尾部与尾鳍摆动的仿生机器鱼的阻力特性,指出像鱼一样摆动时,拖动模型与驱动尾部摆动消耗的能量比拖动不摆动的刚性模型消耗的能量要小。 国内研究者的工作大都集中在对鱼体尾部及尾鳍摆动推进方式的研究上,这种机器鱼具有一个刚性的前半身和一个可以摆动的尾部及尾鳍,活动的关节不是很多,制作及控制较为方便。人们已制作成功了能在实验水池中游动的单个机器鱼以及可集体行动的机器鱼群。2002年,刘军考等实验研究了尾鳍摆动推进仿生机器鱼的运动学参数对推进速度的影响,指出仿生机器鱼可以实现对水下运动装置的推进,并且具有噪声小、对环境扰动小的特点;张向明等对鱼形机构的单尾鳍板摆动的水动力学特性进行了试验研究,讨论了摆幅与推力、航速等的关系;梁建宏等研制了小型实验机器鱼,探讨了仿生机器鱼技术的一些关键问题,基于波动推进理论,制作了仿生机器鳗鱼。








