














基本信息
- 项目名称:
- 矿用救灾蛇形机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- “矿用救灾蛇形机器人”是针对我国地矿资源丰富,赋存条件复杂,频发矿难和震灾的现实研制的。作品主要用于矿灾或地震后极端环境的探测搜救工作。作品体积小,结构简单,能实现模拟生物蛇的多种真实运动形态,其各电路模块具有保证井下瓦斯环境下的本质安全和自安防爆功能。通过智能系统的控制和搭建传感测量系统,能进行灾后极端环境下的多维时空事故信息探测和人员搜救,为抢救方案的制定决策提供最直接依据,有效节约挽救矿难人员的时间。
- 详细介绍:
- 作品实现功能:蜿蜒前行/后退、钻洞、越障、侧移、蠕动、爬坡、抬头、摆头、攀爬、缠绕等;外界多种时空信息获取功能(瓦斯浓度、温度、视觉等信息的无线探测、传输)。 作品特色:机器蛇控制系统和机械系统的井下本质安全和自安防爆功能,保证了作品在井下使用的可能前景。
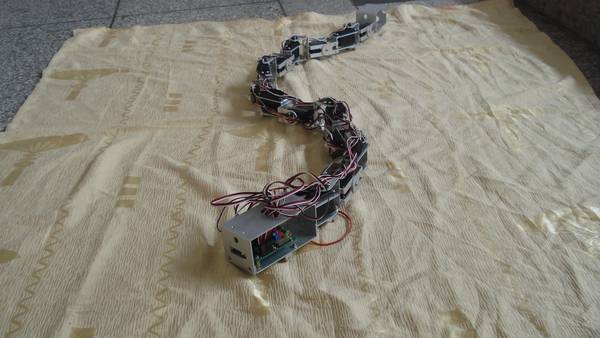
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:研制用于矿灾、震灾后极端环境下的探测搜救的机器蛇,以适应非结构环境的不可预测和危险性;通过人机互动深入环境内部执行任务,获取现场信息,并有效传输。 思路:①在充分掌握国内外文献的基础上,对蛇形运动形态进行理论分析,建立运动形态的运动学、动力学模型,并用机构学原理进行多种运动模态设计。②用Pro/E进行运动学、动力学分析;为各关节节点控制提供转角坐标。③图纸设计、实物制作。④多种运动模式的编程,通过其多种运动模式的无线控制、自主避障及运动方式切换,以满足其在非结构环境中的自适应性。⑤完成机器蛇的机构运动调试、控制程序调试和系统整体调试。 创新点:①应用前景创新:自然灾害——矿井灾害和地震的频发,当事故发生后,必须用有限的时间和资源对生存者搜救和矿难现场复杂环境信息探测,以赢得宝贵的抢救生命的时间。②研究思路创新:Pro/E辅助设计验证三维机器蛇机构运动仿真的正确性。③实践特色创新:机器蛇的功能实现是建立在保证井下瓦斯环境下的本质安全和自安防爆功能的基础上。独特的攀爬和缠绕能保持机器蛇在垂直表面静止不下落。 技术关键:实现机器蛇三维空间运动的机构设计和结构实现;实现多种运动模式的物理控制和自主避障及无线信息采集、传输和处理;各电路模块的本质安全和自安防爆功能。攀爬和缠绕功能的自锁特性。 主要技术指标:实现生物蛇几类基本的运动模式:蜿蜒前行/后退、钻洞、越障、沙地侧移、爬坡、抬头、攀爬、缠绕等。主要控制参数:机器蛇的运动形态参数、不同模式的运动速度及运动路线。
科学性、先进性
- 科学性:在分析蛇的多种运动形态:蜿蜒、蠕动、侧摆、攀爬和缠绕,用机构设计出机器蛇的关节结构,通过Pro/E仿真模拟,设置机器蛇运动模式的相邻和过渡波形,使其身体关节沿合力方向排列,减小前进阻力,实现机器蛇的仿真爬行及三维空间关节运动控制;以此对机器蛇模型进行计算,得到影响机器蛇爬行速度的主要影响参数。机器蛇的各电路模块具有保证井下瓦斯环境下的本质安全和自安防爆功能。 先进性:作品可模拟真蛇的几类生物运动,实现了机器蛇运动模式的多样性,使其对环境的自适应能力强;作品结构简单,具有模块化和可重组特点,重心驱动的特点使其运动更灵活性,运动平稳度高;各电路模块具有本质安全和自安防爆特性。机器蛇通过人机互动实现了狭小物理空间环境的内部多维时空信息探测,并能有效传输。机器蛇独特的攀爬和缠绕及其自锁特性,使其在实际矿灾搜救的任务中能表现得更灵活。
获奖情况及鉴定结果
- 2009年3月在学院挑战杯预赛中获一等奖; 2009年4月在学校举办的第三届挑战杯决赛中获一等奖; 2009年5月在郑州大学举办的河南省第七届挑战杯比赛中获一等奖。
作品所处阶段
- 第三代机器蛇研制改进阶段
技术转让方式
作品可展示的形式
- 现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:通过上位机调用运动程序模块实现机器蛇不同运动模式。信息采集模块实时现场信息采集,并根据需要进行无线传输,进而实现其无线控制,进行信息探测及人员搜救。 技术特点:机器蛇体积小、运动灵活、通过无线传输指令能实现生物蛇的多种运动模式,实现事故现场多维信息采集和传输。 优势:①体积小、重心驱动使其有良好的适应性。②多类运动形式,适应多种环境作业。③模块化设计提高系统的可装配性、可靠性和维护性。④结构可密封,适于极端环境作业。 适应范围:极端环境下,如矿灾后人员搜救及现场信息探测;狭小空间信息探测;星际探索等对非结构环境的探测等。 应用前景:煤炭行业采空区内瓦斯浓度的采样和分析;矿灾等事故后极端环境下的搜救;军事侦察、地下管道等非结构环境下作业。 市场分析和效益预测:机器蛇体积小,运动灵活,可对现实和科学研究中许多不能到达或不能直接观察的地方进行信息探测。管道机器人就是机器蛇的一种,随该技术的发展,机器蛇会在科学研究和现实生活中扮演越来越重要的角色。
同类课题研究水平概述
- 第一台机器蛇由东京工业大学在1972年研制。它由电机驱动的单自由度关节串联而成,每一关节安装一对被动轮,用以改变机器蛇运动的纵横摩擦系数比,可实现平面蜿蜒运动。而后的几代样机,如ACM-R2采用差动驱动的两自由度关节实现三维空间运动;ACM-R3由单关节模块回转轴线互相垂直连接实现直接单元驱动,能完成平面蜿蜒运动、侧向滚动、螺旋运动、近S曲线等运动形式。 其后,美国加利福尼亚学院的Chrikjian从超冗余度角度对机器蛇的机构和运动理论研究,提出采用变几何珩架结构(VGT)作为机器蛇的基本构架形式。日本NEC公司开发研制的一种由刚性体关节相连的机器蛇机构能完成三维空间运动;但因刚性体单元较长,它不能仿生物蛇的运动。后来美国的JPL实验室采用NEC的设计研制JPL机器蛇,用于空间站探索。德国KarlL.Paap研制(GMD),该样机每节由两个橡胶关节组成,一个单元有四组驱动实现了各方向的灵活运动,缺点是由于抬起的重力,关节产生失控的扭动。美国NASA改进卡耐基梅隆大学(CMU) 研制的机器蛇,实现了多种运动。法国、意大利、瑞士等各国学者相继开展了相关课题的研究。 国内,上海交通大学于1999年研制出我国第一台微小型机器蛇样机。北京航空航天大学研制出一个电机驱动、计算机控制、特殊铰杆式同步万向节连接的6自由度柔性臂RT-1柔体机器蛇。中科院沈阳自动化所机器人开放实验室提出的可重构机器蛇设计采用正交串联结构,可完成蠕动、游动、滚转等运动。国防科技大学研制的机器蛇在国内报道最早,由最初的二维结构、依靠从动轮前进,发展到现在的能在水中游动。燕山大学研制出具有并联机构的机器蛇。2008年上海交通大学实现了机器蛇的缠绕功能。 目前机器蛇的研究正朝以下方向发展:用可重构结构具有的通用性、鲁棒性和经济性实现要完成未知任务的自决策重构功能,以适应环境变化;运动自主控制实现主体协调通讯和其它模块协调通讯;能量自给功能实现对自身传感器和执行器的控制,使机器蛇小型和轻型化,解决其长时间能量自给。








