














基本信息
- 项目名称:
- 深海复合轮式行走机构的设计与研究
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
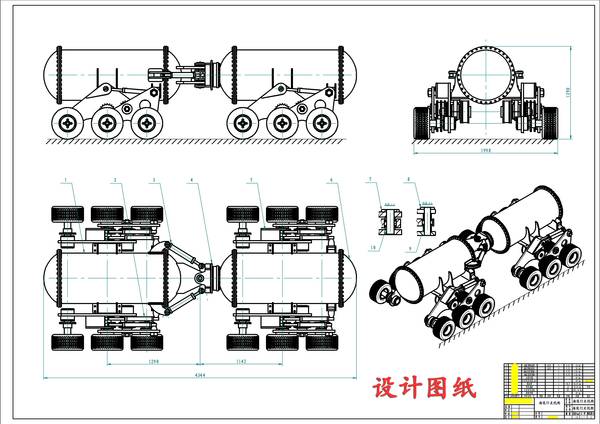
- 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。
- 详细介绍:
- 深海富钴结壳和金属热硫化物资源将成为本世纪的新兴产业。为了在深海领域占据有利地位,世界各国纷纷致力于深海技术的研发,海洋已经成为继月球、火星之后世界范围内又一争夺热点。目前,深海技术研发的热点集中在适应其赋存状态的行走技术方面。国内外学者研究的行走方式主要有履带式、轮式、腿式和轮腿式。基于运动的灵活性,并考虑到功耗和控制的复杂性,多数行走机构采用轮式结构。但目前大多数轮式行走机构在复杂地形和松软底质上的移动能力和越障能力还较差,一般只能越过高度小于轮胎半径的垂直障碍,跨过宽度小于轮胎直径的壕沟。 针对目前国内外轮式行走机构存在的弊端,作者提出了一款全新的、具有主被动混合越障模式的深海复合轮式行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统和控制系统,其设计涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域,各总成匹配协同优化设计,使得该行走机构不仅能被动的自适应一般的深海地形环境,还能采用主动控制的方式越过高于轮胎半径的台阶,跨过大于轮胎直径的壕沟等特殊复杂地形。整个行走机构具有自适应能力强、越障避障性能高、体积小、重量轻、功耗低、承压能力大、运动灵活、安全可靠等优点。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- (1)研究目的:研制一款全新的、具有主被动混合越障模式的深海复合轮式行走机构。(2)基本思路:a.深海非结构底质力学特性分析与实验室模拟;b.行走机构的总体设计;c.行走机构通过性能分析;d.行走机构运动学建模分析;e.行走机构虚拟样机仿真研究;f.行走机构原理样机试验研究;(3)本设计具有以下创新性设计: a.复合轮组的主、被动控制设计 不仅能被动自适应一般深海地形环境,还能采用主动控制方式越过高于轮胎半径的台阶,跨过大于轮胎直径的壕沟等特殊地形; b.复合轮组几何结构设计 使得各个轮胎的轴荷能够平均分配到各个轮胎; c.传动系统的复合设计 采用多级复合链轮的链条传动,使该机构拥有12x12的全驱动能力,有较大的接地比压; d.铰接式密封抗压型整体罐式车架设计 既可承压又使得运动高效灵活,提高越障和避障的稳定性; e.压力补偿技术 实现了水下液压系统与常规液压系统在设计方法上的统一。(4)技术关键:a.在满足任务要求和实现功能的基础上,减小体积、质量和功耗;b.增强越障性能;c.提高运动稳定性;d.增强深海自身防护能力;e.自主导航与路径规划技术;f.避障能力;g.多传感器信息融合、信号及数据压缩、传输与恢复;h.深海压力补偿技术等等。(5)主要技术指标:a.行驶速度在0.1-0.8m/s;b.通过高于轮胎半径的垂直障碍;c.爬30°坡;e.跨越大于轮胎直径的壕沟;f.可搭载载荷2t;g.最大包络尺寸4200mm/2000mm/1500mm。
科学性、先进性
- 目前,国、内外传统轮式行走机构在复杂地形和松软底质上的移动能力和越障能力较差,一般只能越过高度小于轮胎半径的垂直障碍,跨过宽度小于轮胎直径的壕沟。 新型深海复合轮式行走机构由四套复合轮组机构和铰接式密封抗压型整体罐式车架连接组成。与现有轮式设计技术相比,复合轮组机构既兼有传统轮式行走机构的特点,又具备智能性很强的主动控制高越障性能。三个车轮W1、W2、W3在油缸1和油缸2的伸缩辅助作用下可实现一定程度的空间结构变化,从而使整个机构兼有主、被动混合越障模式。主动模式下可以越过高于轮胎半径的垂直障碍,跨过大于轮胎直径的壕沟;被动模式下,可以爬30°坡,自适应普通海底底质环境行驶等等。其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域,新型复合轮式行走机构在设计上解决了传统轮式行走机构设计上存在的越障能力差的弊端。
获奖情况及鉴定结果
- 1.2010年12月获学校“摇篮杯”大学生课外学术科技作品竞赛一等奖; 2.2011年获省级“挑战杯”大学生课外学术科技作品竞赛特等奖;
作品所处阶段
- 中试阶段
技术转让方式
- 合作开发
作品可展示的形式
- ■实物、产品 ■模型 ■图纸 ■磁盘 ■图片 ■录像 ■样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 目前大多数轮式行走机构在复杂地形和松软底质上的移动能力和越障能力还较差,一般只能越过高度小于轮胎半径的垂直障碍,跨过宽度小于轮胎直径的壕沟。该新型深海复合轮式行走机构的创新性设计弥补了传统轮式行走机构越障能力相对较差的弊端,不仅可以越过高度大于轮胎半径的垂直障碍,还可以跨过宽度大于轮胎直径的壕沟等各种深海复杂地形。先进的深海补偿技术和铰接式密封抗压型整体罐式车架相结合,既可深海承压又使得运动高效灵活,提高越障和避障的稳定性。 深海复合轮式行走机构的设计研究对发展我国的深海技术,开发深海富钴结壳及热液硫化物资源具有极为重要的战略意义。其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域,对推动相关学科协同发展和技术创新具有重大意义。该机构的设计应用不仅为深海采矿车的研究及开发提供理论参考和技术支持,同时,在航天科考、救灾排险、军事侦察、矿业林业、助残等方面均具有巨大应用前景,因而具有重要的学术意义和工程应用价值。
同类课题研究水平概述
- 目前,国内外适应各种地形的行走方式主要有轮式、履带式、腿足式以及混合式,它们各具不同的地形运动特性: 1.轮式行走方式的特点是效率高、灵活性高,与悬挂、轮胎形式的设计结合,可以得到较高的通过性能和抗侧翻的能力。各国的月球车方案均首推轮式设计,且在军用领域轮式方案已经逐渐成为各国战场运输的主力平台,轮式装甲车造价和维修费用低,由于驱动方式和悬挂形式的改进,其通过性能、稳定性能已经不逊于履带式装甲车。 2.履带行走方式是轮式移动机构的拓展,接地比压小,通过性能和越野机动性强,具有良好的牵引附着性能,适合在松软地面和凹凸不平的地面上行走,其适应地形的方式是破坏性的,且能耗大。 3.腿足式移动方式采用了类似人、兽或昆虫用脚迈步移动的运动方式,地形适应性广泛。在崎岖松软的地表上行走时具有良好的能耗特性,但结构复杂,且难以控制,尤其是行走重心移动及稳定性问题。 基于运动的灵活性,并考虑到功耗和控制的复杂性,多数行走机构采用轮式结构。但目前大多数轮式行走机构在复杂地形和松软底质上的移动能力和越障能力还较差,一般只能越过高度小于轮胎半径的垂直障碍,跨过宽度小于轮胎直径的壕沟。 本设计提出了一种全新的、具有主被动混合越障模式的深海复合轮式行走机构。该行走机构不仅能被动的自适应一般的深海地形环境,还能采用主动控制的方式越过高于轮胎半径的台阶,跨过大于轮胎直径的壕沟等特殊复杂地形,弥补了传统轮式行走机构越障性能差的弊端。使得该机构不仅既具有传统轮式行走构灵活性的优点,还具有其它行走机构主动控制的高越障能力的优点。








