














基本信息
- 项目名称:
- 仿手指的自适应柔性夹具
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 在工业生产过程中,工件的装夹往往是一对一进行的。目前,市面上还没有出现一对多的夹具,这极大的影响了企业的生产效率和效益。 仿手指的自适应柔性夹具就是针对这一情况量身定做的。这种自适应柔性夹具能在一定范围内,对于形状复杂的工件,这个夹具都能完成比较精确的装夹。
- 详细介绍:
- 本作品主要解决的问题: 1、能夹持复杂形状的工件(异形工件)。 2、一次装夹,多面加工,可以使用在数控铣床中。 3、一种夹具能装夹多种类型工件,实现一对多的工件装夹。 本作品是一种采用步进电机驱动的模块化柔性夹具,其结构简单,控制方便,驱动能力好,夹持灵活。同时可以实现两种不同角度的夹持,它由移动系统、夹持系统、气压系统、电源系统四个部分组成。用ADC模数转化器把倾角传感器的模拟信号转换成数字信号输入单片机,控制者就通过单片机输出的电压对角度进行控制,这样就能更准确的夹持多个方向的工件了。
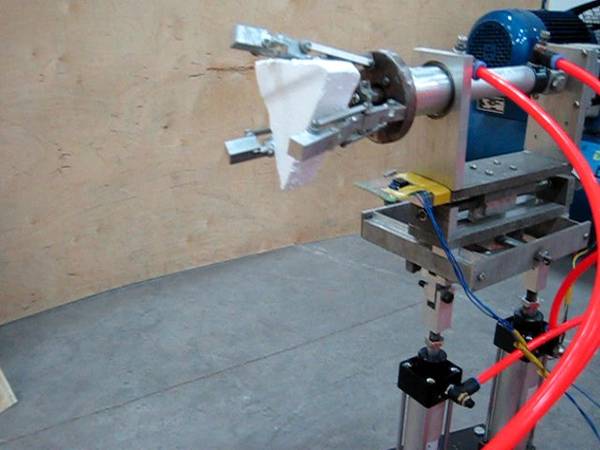
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:开发一种仿人手指的、具有自适应功能的柔性夹具。根据现有机床的特点,无论被加工工件的形状如何,该夹具都能完成比较精确的装夹。 基本思路: 1、仿手指的自适应柔性夹具机构设计。 2、仿手指的自适应柔性夹具控制系统设计。 创新点:1、采用柔性机构,整体自由度高。2、触手前端采用弹性材料,夹持能力好,保护被夹工件。3、能够夹持形状复杂的异形工件。4、一次装夹,多面加工。5、驱动原理及控制方式新颖。 技术关键:1、柔性的触手机构设计与制作;2、手指的机电液伺服控制系统。 技术指标:包括规格参数、基本参数和其它参数。规格参数:1、抓重:0至300Kg;2、自由度数目:共有12个自由度;3、定位方式:固定机械挡块,可调节机械挡块;4、驱动方式:步进电机、液压。基本参数:1、行程:600 mm,行程范围:伸缩范围1000-1600mm;2、速度:在全行程上的平均速度50mm/s;3、定位精度:定位精度±0.01 mm及重复定位精度±0.05 mm;4、控制系统动力:电液。其它参数:1、驱动源:液压站压力:16Mpa,电动机功率:8Kw;2、手爪部分:最大张开角度为60o,抓取零件的直径范围50mm——500mm,夹紧力为300Kg;3、轮廓尺寸:800*800*1500;4、重量—整机重量:350 Kg。
科学性、先进性
- 夹具作为重要制造装备中较为主要的关键装备而被广泛研究,主要应用于汽车、船舶、舰艇、飞机、卫星、火箭、宇宙飞船、大型机床、大型生产线与设备组以及钢铁冶金等行业。 现有技术中,工业夹具由于功能单一,对于形状不规则工件自适应性能力较差,具有很大的局限性,一般只能完成一、二种特定的作业,因而在工件形状不规则的情况下,将限制专业夹具自由度方面的发展。 因此需要一种自适应柔性夹具,能够完成对各种形状工件比较精确的装夹,适用于有多种作业需要的场合。 本仿手指的自适应柔性夹具的特点在于: 1、在末端执行件上进行技术创新及工艺创新,不仅增大了整体自由度,而且增大了末端执行件的自适应性,能够夹持形状复杂的工件,自适应能力强; 2、一次装夹,可进行多面加工,装夹一次可完成多个加工工序,以此减少工序时间实现高效率化。 3、能够装夹多种工件,工件的装夹范围广,本夹具可以替代多组成套夹具。
获奖情况及鉴定结果
- 无
作品所处阶段
- 已完成模型制作
技术转让方式
- 面谈
作品可展示的形式
- 模型、现场演示、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:1、仿手指的自适应柔性夹具,包括动力装置、基座和手臂总成,手臂总成包括下臂总成、上臂总成和夹钳总成。2、基座为箱式结构,动力装置以液压的方式从进气口为前后两个举升液压缸提供动力,两个举升液压缸缸体立在基座上与其转动配合。3、伸长液压缸缸体前端通过机械机构与指节连接,伸长液压缸后端部固定设置有步进电机,带动整个夹持机构的旋转和伸缩运动。4、手指由三个关节通过连杆及销钉配合连接。5、动力装置为步进电机及液压缸。 技术特点:能抓紧各式各样的工件,在工业生产中能适应更多的工件,从而降低加工成本,节约加工时间,最终的目的是提高生产效益。 优势:1、机械结构上的创新;2、控制精度高,3、控制灵活,自由度高。 适用范围:汽车、船舶、舰艇、飞机、卫星、火箭、宇宙飞船、大型机床、大型生产线与设备组以及钢铁冶金等机械制造行业。 推广前景:突破了常规夹具装夹工件的局限性,一个夹具能够替代多组成套夹具,大大降低了制造企业的加工成本,有很大的市场应用前景。
同类课题研究水平概述
- 我国的机械制造业近年发展迅速,2008年,我国机械制造业产值达到27100亿元,2009年,达到35233亿元,增幅30%,截止到2010年7月,达到42779亿元,今年也有望突破30%的增幅。制造业的快速发展带动了夹具工业的发展,2008年,我国夹具产业的产值为378.3亿元,2009年,达到425.7亿元,截止到2010年7月,达到623.4亿元。可见夹具行业具有巨大的市场和发展前景。 国际生产研究协会的统计表明,目前中、小批多品种生产的工件品种已占工件种类总数的85%左右。现代生产要求企业所制造的产品品种经常更新换代,以适应市场的需求与竞争。然而,一般企业都仍习惯于大量采用传统的专用夹具,一般在具有中等生产能力的工厂里,约拥有数千甚至近万套专用夹具;现有的工业夹具已经不能满足现代加工与制造的要,主要体现在: 1)通用夹具的缺点:夹具的加工精度不高,生产率也较低,且较难装夹形状复杂的工件,不适合异形零件的装夹。 2)专用夹具的缺点:设计、制造周期长,对单件或小批量生产而言,需要的种类数多,使用成本较高。 3)组合夹具: ①槽系组合夹具的缺点:定位螺栓在X/Y轴上线性调整,被加工零件靠摩擦力定位,受力大或多次使用时定位点会产生位移。 ②孔系组合夹具的缺点:只能是在预先设定好的坐标点上定位,不能灵活调整。 4)可调夹具的缺点:虽然使用范围比专用夹具广,但是在现实生产中仍然体现了在使用范围中的局限性,故使用成本也较高。 上述情况极大的限制了工业生产的进度。基于这种现状,我们提出了一种仿手指的自适应柔性夹具,本作品能自动调整定位精度,其仿人手指的装夹系统能适应各种形状复杂的零件,同时具有多自由度的调整机构,夹持方便;采用液压伺服系统,夹持牢固而且控制精度高。本作品能完全满足多品种、小批量、面向用户定制的柔性制造系统的需要。同时一套产品能同时替代现有的专有夹具、组合夹具、调整夹具,集多种夹具的优点于一体,为企业节省大量的成本、缩短工艺装备的设计、制造工期、以及产品换型后对原有工装夹具延续使用起到至关重要的作用,具有非常高的经济效益和社会效益。








