














基本信息
- 项目名称:
- 贴接法自动蔬菜嫁接机器人的研制
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 我国蔬菜瓜果种植过程中嫁接需求量大且因季节原因集中短期内作业因此劳动强度巨大,在劳动力成本持续升高的今天机械化自动嫁接已成为趋势。本项目接合我国蔬果种植特点研制出了适合多种蔬果的嫁接机器人,其嫁接速度最高可达720株/小时且嫁接成功率大于92%,其速度是手工嫁接的三倍以上,以三倍于人工嫁接的速度计算,自动嫁接可为嫁接环节省去60%以上的劳动力。产品目前处于中试阶段,其推广前景优良。
- 详细介绍:
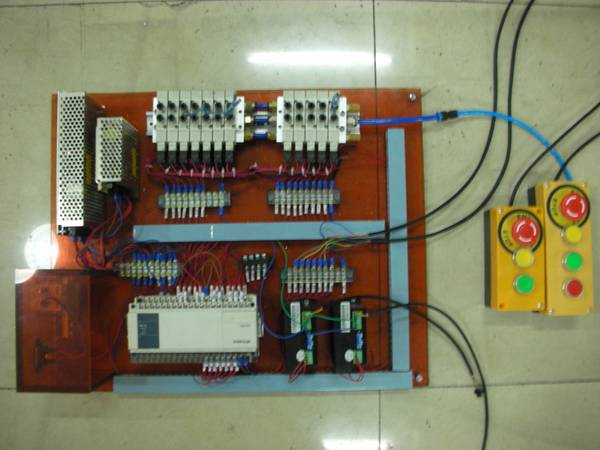
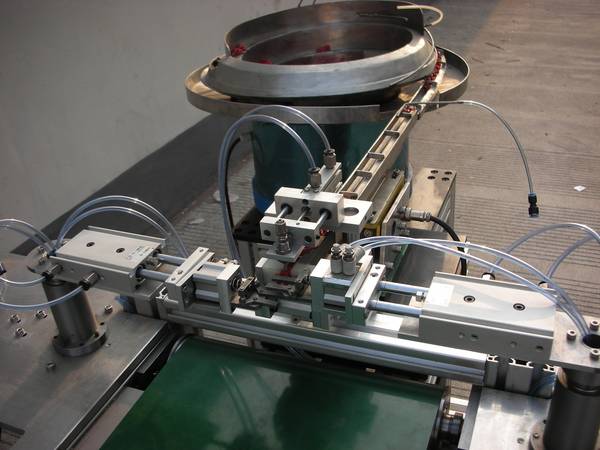
- 蔬菜嫁接技术是提高植株抗土传病害的能力、提高植株抗逆性、提高产量的有效途径。蔬菜自动嫁接是基于嫁接理论的一种集机械、自动控制与计算机视觉于一体的自动化装备,是替代人工嫁接的有效途径。以西瓜为例,2010全国年产量近6600万吨,以3倍于人工嫁接的速度计算,自动嫁接可为西瓜嫁接环节省去60%以上的劳动力。 本项研究针对我国蔬菜种植面积大,机械化作业程度和装备水平低这一现状,在国内外研究现状和发展趋势的基础上,设计了一台结构简单、自动化程度较高、操作方便、成本相对低廉的自动蔬菜嫁接机器人。 本研究以西瓜为对象,对比各种嫁接方法,结合前期积累的研究基础,选择了西瓜的断根贴接法。团队以嫁接苗入手进行研究,包括几何尺寸分析和力学性能的测定,这些数据为机构尺寸的设计提供了依据。该嫁接机器人包括一套辅助供苗系统和自动嫁接装置。辅助供苗系统包括图像采集等硬件和基于VB开发的软件,主要负责前期的视觉检测分析、嫁接苗夹取和搬运工作,其中搬运部分采用了一种二自由度并联机构,提高了机构运动的精度,使得末端执行器最大误差在0.12mm以内。自动嫁接装置主要负责砧木夹持、子叶切削、砧木搬运、接穗夹持、接穗切削、接穗搬运、砧木和接穗的接合等工作,机构采用气动和电机混合驱动的方式,在结构上添加了微调机构,使该机构更具有适应性。 该机器人采用了三菱的FX系列PLC作为控制部分的核心,实现顺序控制,并用GX-Developer进行编程。嫁接试验表明该嫁接系统运行可靠、操作方面,且得到一组最适合嫁接的苗木参数:砧木子叶展角接近180°,苗茎在3.5-4.5mm,接穗苗茎在2.0-3.0mm,该参数范围内的嫁接苗嫁接速度可以达到720株/小时,成功率为92%以上。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 嫁接技术能够很好的解决作物连作障碍,因此日本等国已展开并研制了相当数量的嫁接机器人然而其嫁接设备始终未能大规模产业化,究其原因还是归结于嫁接机器人对工厂化、机械化育苗的高度依赖,因此针对国内农场规模较小,机械化作业水平低的现状,研制适合我国国情的嫁接设备将大大减少农民的劳动强度,提高农业机械化水平。 项目立足国内嫁接作业时嫁接苗长势不一、方向各异等特点,研究的创新点和关键技术主要包括:基于视觉的嫁接苗测量系统、自适应夹持手和自动方向调整定位机构。 作品主要采用贴接嫁接法;采用双工作臂模式;尺寸小于2000×1500×1500mm;视觉检测;嫁接苗方向自动调整;设计嫁接速度大于500株/时,嫁接成功率大于90%。
科学性、先进性
- 由于国内嫁接设备均处于试验研制阶段,本项目将日本嫁接机作为比较对象。 从技术层面,日本的嫁接机器人技术较为成熟采用全自动嫁接,嫁接速度大于600株/时,嫁接成功率大于90%,本项目研制的嫁接机器人在速度上稍逊于日本设备,其原因在与日本高速的嫁接机器人采用多株苗同时嫁接(要求工厂化育苗使其具有高度一致性,国内设备无法配套)。 从实用性方面,日本嫁接机器人主要针对一种或一类嫁接对象,且需要工厂化育苗的前提条件,这是嫁接机器人还没有在日本国内广泛使用的主要原因。本项目研制的嫁接机器人针对缺乏工厂化育苗而大小各异的嫁接苗研究了包括基于视觉的嫁接苗测量系统,自适应夹持手,子叶方向自动调整机构等创新技术,提高嫁接机器人的实用性。 从经济角度,日本各类嫁接机器人的价格折合人民币大概在几十万元,有的甚至超过一百万元,其价格远高于国内承受力,且日本嫁接设备尚未对我国出售。本项目研制的嫁接机器人成本低于2.5万元人民币,且这个数字为研究试制的费用,如改进量产还可大幅缩减。
获奖情况及鉴定结果
- (1)2011“挑战杯”校决赛特等奖; (2)2011省第十二届“挑战杯”大学生课外科技作品竞赛特等奖、最佳创意奖; (3)《Development of an improved robotic graft system for gourd type vegetable seedlings》一文被美国机械工程协会主办的机械工程领域国际峰会“ASME 2011 International Design Engineering Technical Conferences”所录用
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 实物、图片、视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 嫁接机器人的嫁接对象主要包括瓜科作物,包括西瓜、黄瓜、甜瓜等,更换部件也可嫁接茄科作物如西红柿、辣椒等。 蔬菜嫁接人工作业技术要求精细,费时、费工、费力、工作效率低。据调查,一个熟练的工人,在平均劳动强度下,采用靠接法,嫁接效率约为 120 株/小时,以一亩地需苗数 3300株为标准,则每亩约需 27.5 个工时,而且由于时令要求,需在短期内处理大量的苗,为争取速度,加快进度,人们需要通宵达旦的工作。如果按机器嫁接600株/小时计算,同样的工作量嫁接时间可以缩短至5.5个工时效率提高了4倍同时可降低劳动强度。 据初步估计,本项目一套蔬菜嫁接设备的成本可控制在2.5万元以内,而同水平韩国生产的蔬菜嫁接机进口至国内的价格高达16余万元人民币,日本自动程度更高的嫁接机器人则要上百万元。可见本项目研制的蔬菜嫁接机具有广阔的市场前景和显著的经济效益。此外,广泛采用蔬菜嫁接机符合我国农业机械化和自动化的趋势,有利于社会主义新农村的建设。
同类课题研究水平概述
- 国内外嫁接机的研究主要集中于日本、韩国和中国。 蔬菜嫁接机的研究最早始于1986年的日本,1987年到1991年先后研制出半自动形式1号样机G871、2号样机G892和全自动式的嫁接试验台架,均采用贴接法和夹子固定。1993年日本井关公司同生研机构协作推出了商品化GR800B型半自动瓜科作物嫁接机以及GR800T型半自动茄科作物嫁接机,生产率为600株/时。日本洋马公司同生研机构协作,1994年研发出AG1000型全自动茄科嫁接机器人,采用贴接法,通用穴盘上下苗,生产率达1000株/时,但价格高达140万元(人民币)。为降低大型嫁接机的造价,洋马公司于2003年推出了体积较小、操作方便的T600型半自动瓜科嫁接机。该机采用V型平接法,只能1人操作,操作人员分别将去土砧木和接穗以单株形式送到嫁接机的托苗架上,嫁接机自动完成砧木和接穗的切削、对接和上固定套管作业。该机生产率可达600株/h,嫁接成功率为98%。 20世纪90年代初,韩国开发出采用靠接法的小型半自动式嫁接机,需人工上下苗和固定夹持,嫁接生产率仅为310株/时,由于结构简单价格低廉,具有一定的销量,但是因为砧木接穗径差大,作业质量不稳定。2004年韩国Idealsystem公司研制出针式全自动嫁接机,该机采用防回转五角形陶瓷针作为砧木和接穗的固定物,利用穴盘整盘上砧木和接穗苗,操作方便,作业速度快,生产率可达1200株/时,适合茄科蔬菜的嫁接作业,但价格高,尚未见其在市场销售。 中国农业大学率先在我国开展了自动化嫁接的研究工作,张铁中教授于1998年开发出2JSZ-600型半自动瓜科嫁接机,采用贴接法,生产率可达600株/时。东北农业大学辜松教授于2005年研制出2JC-350型半自动瓜科嫁接机,采用断根插接法,成本低廉,但嫁接的生产率与国外相比还有很大差距,需要进一步改进和提高,目前正在进行瓜科作物的全自动嫁接机研制,设计生产率为1200株/时。目前台湾台南区农场与台湾大学及宜兰技术学院生物产业机电工程学系共同合作开发出套管式茄科嫁接机。








