














基本信息
- 项目名称:
- 放射性检测机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
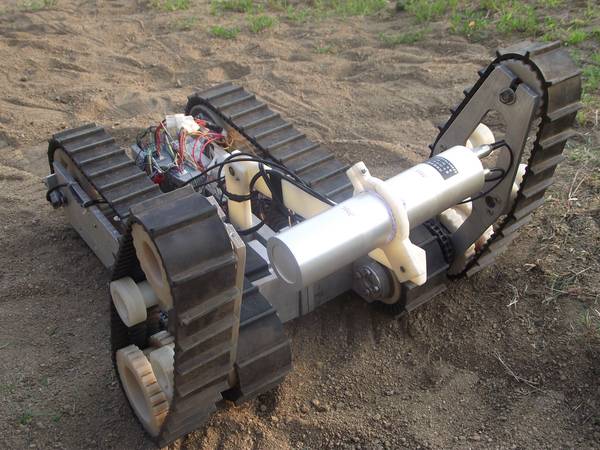
- 为对工业废渣、核安全事故现场放射性进行检测,团队设计了一款小型放射性检测机器人。本作品由运动平台和放射性检测单元两个部分组成。运动平台具有反应快、机动性强等优点,可适应多种路况;放射性检测单元包括测量存储数据的下位机硬件和分析处理数据的上位机软件,具有分辨率高、测量范围宽、准确度高等优点。该作品可在多种复杂环境中完成放射性物质的检测,为现代救援和灾后评估等提供了一个机电一体化的实用性设备。
- 详细介绍:
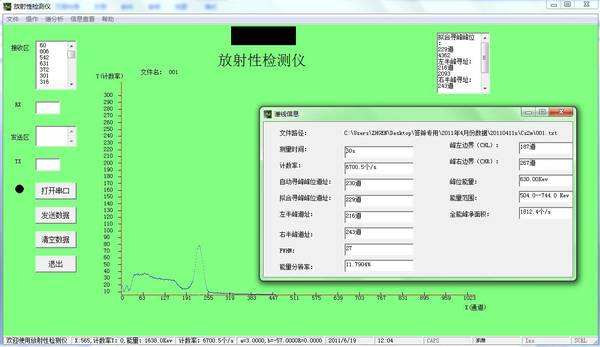
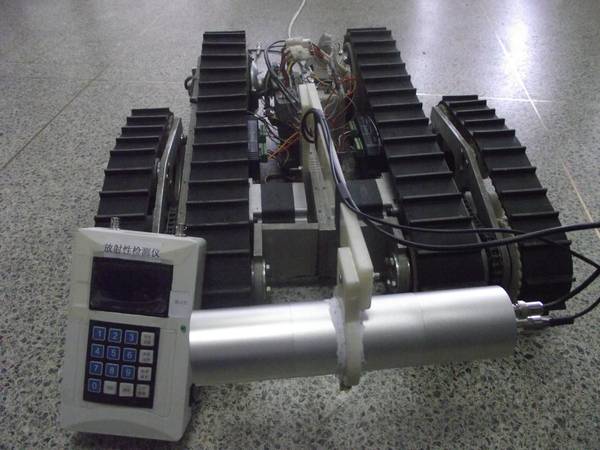
- 日本发生核爆炸事故之后,核污染、核辐射日益成为人们关注的焦点。通常核安全事故现场环境复杂多变、地形不规则、放射性污染严重,所以检测救援人员不便直接携带检测设备对现场放射性物质进行测量。针对这一问题,团队设计出一款放射性检测机器人,用于对复杂环境下放射性物质活度的测量。本作品主要包含两个部分:机器人主体运动平台和放射性检测单元。 1)机器人主体运动平台 主体运动平台由履带臂、车体、机械臂等部分组成。履带臂采用了仿生学原理使其关节可以实现多角度或方向的伸展和旋转,通过其灵活多变的关节姿态组合,可以改变移动平台外形及行走方式,具有很强的越障通过能力;车体可以实现大角度的折叠,通过自身调整极大地适应了复杂多变的地形;运动平台装备了三关节机械臂,通过夹持检测装置可以轻松地实现任意方向和角度的检测。主体运动平台通过遥控模块进行控制,具有操作方便、反应快、机动性强等特点。 2)放射性检测单元 放射性检测单元包括测量存储数据的下位机硬件电路和分析处理数据的上位机软件。下位机数据测量模块安装在运动平台上,数据存储模块与上位机相连。测量数据通过无线通信传送至数据存储模块后可经RS232串口传送至上位机。上位机采用Visual Basic 6.0软件对数据进行谱线绘制、平滑滤波、拟合寻峰,通过获得的能量分析出含有的放射性元素及其能量范围,最终实现放射性活度的计算。检测单元较精确地实现了能量的刻度、自动和手动寻峰等,能够准确判断的能量范围为0.01-2.97Mev,具有分辨率高、测量能量范围宽、工作可靠等特点。 该小型移动放射性检测机器人具有体积小、行动灵活、成本低廉、测量准确度高、可靠性强等特点。该机器人可代替工作人员在复杂多变的环境中完成放射性物质的测量,避免了救援、评估人员直接受到外部辐射,提高了灾后现场检测、评估的工作效率和科技含量,为现代救援、灾后评估等提供了一个机电一体化的实用性装备。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
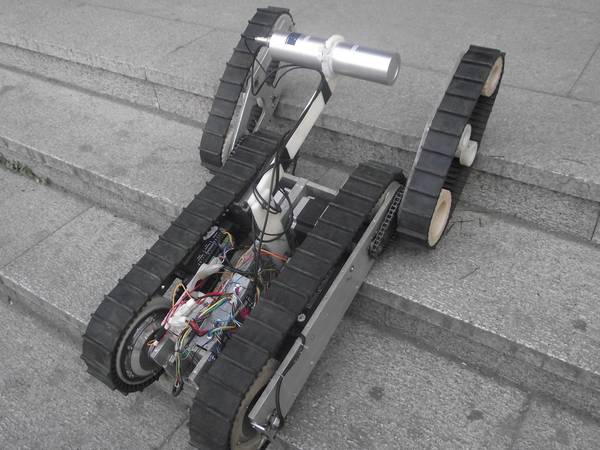
- 工业废渣中的放射性物质,核安全事故突发等辐射性危害事件逐渐成为人们关注的焦点。环境中如果所含核素超标,会对人体造成伤害,设计出能准确地进行无人检测的小型移动放射性检测设备十分关键。作品以此为目的设计出能进行实时检测与在线分析的检测单元,并且将其搭载在小型遥控运动平台上构成放射性检测机器人,而整个系统则具有机动性强、测量准确等特点。 创新点: 1、整个系统采用无线控制,避免了现场检测 时环境对测量人员造成伤害; 2、测量数据通过无线传输方式返回操作平台,测量人员可对放射性进行实时分析处理; 3、仿生履带臂通过关节姿态组合,极大地适应复杂多变的地形,扩大了系统适用范围; 4、移动平台具有折叠和俯仰功能,减轻电机的负载和车体振荡对放射性检测电路的影响。 技术关键: 1、利用稳谱调节技术降低了噪声对放射性检测电路的干扰; 2、运用嵌入式操作系统实现放射性测量任务的调度; 3、采用轮履复合结构实现运动平台平稳灵活地越过障碍、废墟等非结构化路面; 4、利用无线通信技术实现检测仪器及移动平台的远距离控制。 主要技术指标: 移动平台的移动能力: 1)最大进退爬行速度:2.5m/s; 2)最大越障高度:300mm;3)最大行进坡度角:45°; 4)最大跨越沟槽宽度:500mm; 检测部分的检测能力: 1)能谱数据存储量:146条;2)能量分辨率:8.2%;3)温度特性:-5~40℃;4)谱线漂移:1道; 5)重复测量精度误差:5.76%
科学性、先进性
- 1、放射性检测设备安装在履带式移动平台上 ,具有很强的越障能力。机器人通过履带臂灵 活的关节姿态组合,极大地适应复杂多变的地形,扩大了系统的适用范围。 2、该放射性检测机器人能实现放射性峰道的 检测并可通过上位机软件计算放射性活度; 3、机器人智能化程度高,既可以实现将测量数据在本机内保存,也可通过USB接口直接上传至上位机; 4、运用嵌入式操作系统来实现仪器功能的调度。嵌入式操作系统在系统实时高效性、硬件的相关依赖性、软件固态化以及应用的专用性等方面具有较为突出的优点。 5、 移动平台具有折叠和俯仰功能,可以在管道上爬行以及靠单侧车身的调整突破小型路障,减轻了电机的负载和车体振荡对检测电路的影响。 6、检测电路和移动平台均采用无线遥控,可通过视频技术远距离操纵机器人的动作。在辐射等有害环境中可以替代工作人员实现全天候勘查和检测,充分降低了危险环境对相关人员生命安全的威胁。
获奖情况及鉴定结果
- 无
作品所处阶段
- 本作品处于实验室阶段,正在对机器人检测装置进行性能测试并对机器人移动平台结构进优化调整。
技术转让方式
- 无
作品可展示的形式
- 该作品可进行现场演示,还可以提供图片、视频等材料。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该放射性检测机器人具有体积小、测量方便、测量能量范围宽、测量准确度高、反应快速、机动性强等优点。机器人作为小型移动检测设备,克服了传统放射性检测仪体积大、人工测量、模拟器件易受环境影响等缺点。中国核能具有极其广阔的发展前景,同时核能工业具有其安全特殊性,因此研发此款机器人不管在民用还是军用都具有重要意义。 ⑴民用领域:核电站及化工厂等场所环境复杂,存在核泄漏隐患并且检测极其困难。工厂排放的废渣中也存在放射性物质。针对这些情况,该机器人能够实现无线控制和高精度检测,并且对环境进行数据采集和在线分析,避免了危险环境对检测人员的伤害,同时采集的数据为工厂的整改提供了重要依据。 ⑵军用领域:以核工业为应用背景的遥控移动式机器人已经成为各国的发展重点。该款机器人具备良好的机动性,可以用于无人侦察等;同时具有准确的放射检测能力,可在恶劣环境下(核、生化战场等)执行特殊任务;能行走在沼泽地,可以延伸作战空间,提高了作战效能,降低作战成本。因此该机器人具有重大军事效益。
同类课题研究水平概述
- 早在60年代,人类就开始了对在野外非结构环境中使用移动机器人的研究。随着人类活动范围的不断扩大,移动机器人在星球表面探测、震区救灾等非结构环境下得到了更加广阔的应用。进入21世纪,以研制适应性强、智能程度高的移动机器人为标志,科研人员开展了更高层次、更具挑战性的研究工作。 世界各主要科技强国研制了多种非结构环境移动机器人,其中美、英、法、德、日等国家的移动机器人技术处于领先地位。 美国联合机器人计划(JRP)发展了一系列中型地面无人车辆来执行侦查、巡逻等任务。英国Hall Automation公司研制出自己的机器人RAMP,近期研制的履带式“手推车”及“超级手推车”排爆机器人已经装备到50多个国家的军警机构。法国的几家公司也研制出不同种类的机器人,有Alsetex公司的SAEMC800爆炸物探测机器人、DM公司的RM35机器人等。德国经过多年的努力,其智能地面无人作战平台的研究和应用在世界上处于公认的领先地位。现装备的主要车型有“清道夫”200扫雷车、Rode爆炸物处理机器人等。在近期日本发生核爆炸事故之后,日本利用名为“Monirobo”的放射性检测机器人进入福岛核电站进行高辐射放射性的测量,成为灾后人类利用高科技安全检测辐射量的一枝新秀。 由于国外技术严密封锁,在国内放射性检测机器人的研究基本处于起步阶段。我国自“八五”期间开始进入非结构环境下移动机器人这一研究领域,并在国家863计划中予以重点支持,其中包括中科院沈阳自动化研究所研制的反恐防爆机器人。对于放射性检测设备的研究已经取得了一些成果,西化仪科技有限公司生产的XR51DP8021型检测仪,探测器为经补偿的GM计数管,该仪器具有较宽的测量范围、较好的能量响应特性,并带有过载指示及保护功能。北京中西化玻仪器有限公司m170194放射性检测仪在测量范围内,可以固定或预置报警阈值,超过阈值或阻塞时发出声光报警。但是在整合放射性检测设备和机动机器人方面还有许多问题没有解决。因此,研究开发用于自主知识产权的放射性检测机器人显得尤为紧迫和重要。








