














基本信息
- 项目名称:
- 可轮旋转换可抬头的螺旋行走机构设计
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 本项目研究一种不同于目前人们常见的行走机构,如轮式、履带式、腿式、蛇形式以及它们的复合式等,而采用螺旋式行走驱动,即以螺旋为特征的新式行走机构。通过机构的设计使其具有以下功能:1、实现能够在复杂、变化的环境和条件下具有适应能力、获得行走运动驱动功能。2、实现能够翻越各种障碍、能适应野外复杂地形地貌越野驱动。3、实现能够平稳爬升楼梯,在建筑中不依赖电梯可进行物资、伤员等的输送。
- 详细介绍:
- 行走机构对人们的生产生活有着巨大的影响,本项目研究一种不同于目前人们常见的行走机构,如轮式、履带式、腿式、蛇形式以及它们的复合式等,而采用螺旋式行走驱动,即以螺旋为特征的新式行走机构,本机构采用两个反向螺旋轮转动,通过调节两个螺旋轮的转速和转向,来实现机构的前后左右四个方向的运动。同时,利用螺旋摩擦副的强摩擦力,来实现机构的爬梯行走。本项目为了更方便实际应用,以及适应不同环境和条件,设计了可进行轮式行走驱动、亦可螺旋式行走驱动的机构,其驱动轴采用可伸缩的机构,以此实现机构的轮式与螺旋式的转换(即轮旋转换),提高其行走效率以及解决转向等问题。同时,为了加强机构对各种复杂地形的适应力,加强其综合行走能力,本项目还设计了锥式螺旋行走机构、可抬头式螺旋行走机构以适应各种复杂地形的行走。 螺旋式行走机构具有适应性强、功能多样、结构简单等显著特点,可应用于多功能机器人的行走、工业方面可用于物体搬运的传送机构,同时利用螺旋行走机构的良好越障能力以及强的环境适应能力可应用于探险救灾、野外科学考察等领域,也可应用于社会生活方面如爬梯工具,高楼缺电的救灾运输、伤员救助等。
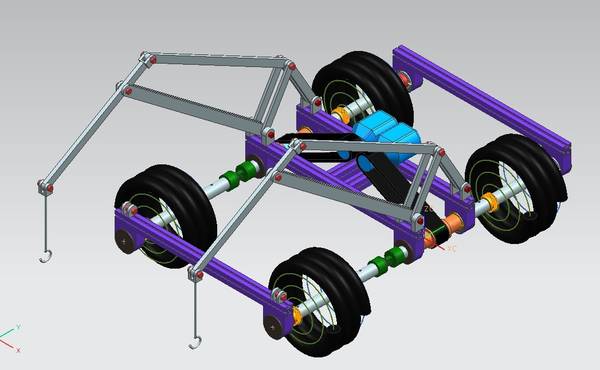
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1 作品设计、发明的目的 为了设计出集行走、爬梯、越障功能于一体的新型行走机构,本项目着手研究以螺旋为特征的行走机构:为了实现机构的全方位行走和爬梯越障,本项目设计采用两个反向螺旋轮作为行走部分;为了提高机构对多种路况的适应性以及解决平地与阶梯障碍的平稳过渡,本项目设计出轮旋转换机构及可抬头机构来实现。 2 基本思路 2.1 设计采用两个反向螺旋轮转动来实现机构的全方位行走和爬梯越障 2.2 设计螺旋转换机构来提高效率 2.3 设计锥式螺旋机构以及可抬头式的机构解决平地和楼梯障碍之间的平稳过渡 2.4 设计以螺杆作为机构的螺旋轮部分来加强机构的越障能力 3 创新点 3.1 原理上的创新 本项目将螺旋机构运用到爬梯上,以实现爬梯功能和平地与楼梯障碍间的平稳过渡,在原理上属于自主创新。 3.2 机构上的创新 在机构上分别采用滚动式、滑动式、螺杆式三种螺旋轮的机构,来实现行走、爬梯、越障等功能,在机构上属于自主创新。 同时轮旋转换机构也是具有自主原创性的机构。 4 技术关键 4.1 旋向相反的两个螺旋轮组成的双螺旋机构的构建 4.2 轮式与螺旋式转换机构的构建 4.3 连续螺旋的加工设计 4.4 直流电机速度控制装置的设计 5 主要技术指标 5.1 可以平地内全方位移动 5.2 可以爬楼梯 5.3 可以越过坡度低于40°的障碍 5.4 可以实现平地和楼梯障碍间的平稳过渡 5.5 可以在烂泥地等具有流变特性介质的路况下行走
科学性、先进性
- 随着社会的发展,目前存在的行走机构主要有轮式、履带式、腿式、蛇形式、复合式等,而以螺旋为特征的行走机构则还很少在行走机构领域得到运用,本项目首次将螺旋运用到行走机构领域以实现爬梯功能和平地与楼梯障碍的平稳过渡,设计出可轮旋转换可抬头的螺旋行走机构,不仅能实现全方位行走以及越障爬梯,也能实现轮式和螺旋式的转换。下面是本项目与相关行走机构的对比: 1、专利文献《一种复合驱动行走机构》中公开了一种复合驱动行走机构,其主要是利用轮和螺旋的同步驱动适应多种具有流变特性介质的特殊复杂环境,并兼顾普通路面的行走。但其未涉及爬梯功能,也未涉及实现平地与阶梯障碍间的平稳过渡。 2、专利文献《管道检测机器人实用技术研究》描述了用于给水管道检测用的机器人的总体结构和行走系统设计,设想了多种方案,分析了其移动原理,并选择了其中螺旋行进原理的机器人进行具体设计。文献涉及发明一种机器人,用螺旋原理来实现行进功能,不同于查新委托项目的双螺旋行进机构,未涉及实现实现转弯、越障及爬梯的运动功能。
获奖情况及鉴定结果
- 1、2011年4月在“挑战杯”XX省大学生课外学术科技作品竞赛终审决赛中获得省级特等奖。 2、在教育部科技查新工作站(G13)中进行国内查新,查新鉴定为国内未见有与本查新委托项目“可轮旋转换可抬头的螺旋行走机构设计”查新点内容完全相同的文献报道。 3、已申请实用新型专利,申请获得国家知识产权局专利受理。
作品所处阶段
- 中试阶段
技术转让方式
- 面议或合作
作品可展示的形式
- 实物、模型、图纸、磁盘、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1 使用说明 越障时请注意不要翻越超过60°的障碍,避免倾倒事故。 2 技术特点和优势 1采用旋向相反的两个螺旋轮构成双螺旋机构,以及轮式和螺旋式的转换机构,使得其能实现平地上的全方位移动和轮旋变换,以及爬梯和越障的功能。 2采用锥式螺旋机构和可抬头机构,实现机构平地与阶梯障碍间的过渡行走。 3采用螺杆式螺旋轮机构,使得机构能在烂泥地等具有流变特性的介质中正常行走。 3 作品适用范围及推广前景 可应用于多功能机器人的行走、工业方面可用于物体搬运的传送机构,同时可应用于探险救灾领域,也可应用于社会生活方面如爬梯工具,高楼缺电的救灾运输、伤员救助等。 4 市场分析和经济效益预测 目前大多数大厦都没有配备专门的用于停电应急的可爬楼梯的运输机构,本项目机构具有良好的爬梯越障功能,同时也能实现平地与楼梯障碍间的平稳过渡,可以有效的解决停电突发事故导致的运输系统瘫痪问题。 对于大型百货超市等物流运输频繁的大厦,购置几台这样的机构来避免停电等突发事故的发生带来的损失,还是很应该的。
同类课题研究水平概述
- 1 中国农业大学.一种复合驱动行走机构 中国农业大学申请的一个发明专利公开了一种复合驱动行走机构,属于车辆行走系统;技术方案包括:由驱动轮、圆柱齿轮、轮轴、圆柱齿轮、锥齿轮、齿轮轴、连杆组成轮式驱动装置,由锥齿轮和驱动螺旋、螺旋轴组成螺旋驱动装置,两组几何参数、结构完全相同的轮式驱动装置分别连结于驱动螺旋装置的两端,主副驱动关系通过调节连杆与车架之间的夹角α与α1实现,驱动力通过齿轮轴输入,形成双驱动轮和驱动螺旋同时驱动的复合驱动行走机构,适应多种具有流变特性介质的环境或田间、森林等特殊复杂环境、并兼顾普通路面的行走,完成牵引与负重功能。 2 郭瑜.微小型螺旋推进管道机器人设计与分析.国防科学技术大学 该文针对管道内径为15mm的微小型管道检测机器人研究,提出了基于螺旋推进原理的微小型管道机器人的解决方案。设计了新型的螺旋头和保持架结构,使此管道机器人的牵引力达到8.512N,移动速度大于10mm/s,满足了管道机器人的“微小化”和“大牵引力”的要求。 本文介绍了螺旋推进管道机器人的组成及工作原理,分析了其运动力学性能,应用机械系统动力学仿真软件ADAMS和有限元分析软件ANSYS,建立了管道机器人的虚拟样机模型。通过计算机仿真得到机器人牵引力、驱动力矩与机器人的驱动轮位置参数和尺寸参数之间的关系以及管道机器人轮子所受的正压力对牵引力的影响,证明了理论分析的正确性,并对模型参数进行了优化,使其综合性能达到最优。对机器人的各部分结构进行了详细的机械设计计算,分析了其在弯管内的几何与运动约束条件和越障能力。最后对机器人进行了有限元强度分析和模态分析,得到最大等效应力、最大变形和各阶固有频率,分别为机器人强度设计、机器人的末端位置精度补偿和机器人调速系统避免共振提供了参考数据。








