














基本信息
- 项目名称:
- 移动显示器支持系统
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 电脑不仅是一个高效的工具,同时也是颈椎病的一大诱因。目前显示器支架均具有承载力小,安装不方便,限于手动调节,成本高等缺点。为达到预防颈椎病的目的,并且避免现有产品存在的缺点,我们提出了移动显示器支持系统。本系统采用并联机构作为主体结构,具有结构稳定,承载能力大,成本低等优点,并且根据医学颈椎康复运动的最佳疗法规划显示器自主运行的最佳运动路径,从而达到积极引导颈椎病康复性治疗的目的。
- 详细介绍:
- 1.移动显示器支持系统是在分析原有产品存在的主要问题的基础上提出来的,并在设计时对主要问题进行重点解决。 2.由于并联机构具有刚度大、精度高、承载能力强等优点,本系统采用并联机构作为移动显示器支持系统的主体结构。并根据医学颈椎康复运动的最佳疗法规划移动显示器支持系统的最佳自主运动路径,研制移动显示器支持系统的主机及运行控制系统,从而实现显示器自主慢速运行。 本系统利用VC++搭建控制界面,通过不同图形选项指定承载平台的运动轨迹,经过实时运动反解确定机构对应输入量后将数据通过USB传输到下位机单片机,单片机处理数据并转换为控制信号控制步进电机转动,从而实现移动显示器支持系统携带显示器运动。 通过机构运动学分析建立其位置反解, 并运用MATLAB软件进行轨迹规划并仿真,以验证移动显示器支持系统的运动特性及反解的正确性。同时通过多目标优化设计确定移动显示器支持系统的最优尺寸,并进行运动仿真模拟。
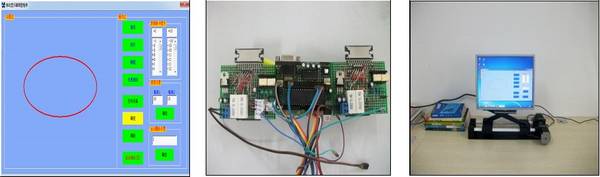
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的: 电脑是颈椎病的一大诱因。为了使电脑工作者达到预防颈椎病的目的,我们提出了移动显示器支持系统。 基本思路: 1.由于并联机构具有刚度大、精度高、承载能力强等优点,本系统采用并联机构作为主体结构。并根据医学颈椎康复运动的最佳疗法规划系统的最佳自主运动路径,研制系统主机及控制系统。通过机构运动学分析建立其位置反解并进行轨迹规划并仿真,以验证本系统的运动特性及反解的正确性。创新点: 1、并联机构及人体工程学的应用 本系统采用基于运动基的并联机构构型理论构型了并联机构作为本系统主体结构,避免了串联结构承载力低,易于变形的缺点。以人体工程学研究中的人体动作域作为设计的参考标准。 2、智能控制 本系统利用VC++搭建控制界面,通过不同图形选项指定承载平台的运动轨迹。使用者只需通过设定运动轨迹便可使本系统带动显示器自主慢速运行,真正实现了支持系统对颈椎病患者的引导性治疗。 技术关键: (1)提出了移动显示器支持系统的运动学正反解,求取了其可达工作空间。 (2)利用VC++搭建系统控制界面,通过选择不同图形选项指定承载平台运动轨迹。 (3)本系统设计了基于TB6560的步进电机驱动电路以及基于PDIUSBD12通信芯片的USB通信电路。 技术指标: 1.本系统动平台处于最高位置和最低位置时左右移动距离分别可达234mm、84mm,上下移动距离可达100mm。 2.本系统工作时运动自由度数为2。 3.本系统工作时行程、速度可调。
科学性、先进性
- 1.整体采用二自由度并联机构,上下平台通过两平行四边形机构相连,避免了串联结构承载力低,易于变形的缺点。 2. 通过上位机设定运动轨迹使系统带动显示器自主慢速运行,真正实现了显示器支持系统对颈椎病患者的引导性治疗。 3.结合人体工程学,规划显示器支持系统的最佳自主运动路径,以达到最佳治疗效果。 4.计算机界面化控制,使控制更加快捷方便,更具有人性化。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 不限
作品可展示的形式
- 实物、产品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明: 将显示器固定在上平台上,将系统与电脑连接,打开控制程序,在控制窗口内设定系统的速度、运动轨迹等参数。然后打开支持系统的电源开关,点击 “开始”按钮即可。如需暂停或改变运动轨迹可在控制窗口中更改。 作品特点及优势: 1.本系统能够实现自动控制。利用VC++构建界面,用户只需在窗口中设置各种参数,即可确定系统的运动轨迹及速度,让显示器按用户的意愿运动。 2. 本系统结构稳定。整体机构采用二自由度并联机构,上下平台通过两平行四边形机构连接。由于两平行四边形机构的存在,上平台会始终保持水平。 3、本系统造型美观、使用方便,并通过系统的非接触式引导治疗及颈椎病的预防,可大大降低长期使用电脑的工作人员颈椎疾病的发病率。 4.本系统制造成本低,结构简单。 应用前景: 本系统对缓解和消除颈椎病具有重要理论意义和应用前景。该系统操作方便,成本低廉,利于市场化。本系统适用于长期使用电脑的办公人员,并可推广到自主移动式电视支持系统等,具有广阔的市场价值和应用前景。
同类课题研究水平概述
- 1.并联机器人的研究现状及其应用 1978年,澳大利亚机构学教授Hunt首次提出把六自由度并联机构作为机器人操作器,由此拉开了并联机器人研究的序幕。80年代末90年代初,并联机器人引起了广泛关注,成为国际研究的热点,各国的研究机构及企业先后展开了并联机器人的研究。 并联机器人是一种新型多自由度空间机器人,其具有刚度大、精度高、承载能力强、反解模型简单、适于实时控制等诸多优点,由于这些特殊的优越性,现已广泛应用于各个领域。 2、显示器支持系统的现状 在现今高速发展的电子信息时代,电脑不仅是一个高效的工具,同时也是颈椎病的一大诱因。 目前市面上已经推出多种用于颈椎病康复锻炼的液晶显示器支架,其主要用于调节显示器摆放姿态。但是这些支架均具有承载力小,安装不方便,只限于手动调节,成本高等缺点,不适于推广和颈椎病的预防及颈椎的康复锻炼。因此,我们着手研制一种移动显示器支持系统。本系统的研制将使电脑工作者在工作的同时达到颈椎病预防与颈椎康复锻炼的目的。 借助于现在并联机器人的发展状况,本系统采用并联机构作为移动显示器支持系统主体结构,通过基于运动基的并联机构构型理论构型符合颈椎康复运动的自由度及符合人体工程学的新型并联机械机构。根据医学颈椎康复运动最佳疗法,规划支持系统最佳自主运动路径,通过建立适于支持系统的最大运动范围、最小体积、最大承载力等多目标为优化参数的设计理论,研制出移动显示器支持系统主机及支持系统运行的控制系统,从而实现支持系统带动显示器自主慢速运动,使使用者在工作过程中颈部跟随显示器不自觉转动,避免了在电脑前长期保持单一姿势而导致的颈椎和背部僵硬、酸胀等颈椎疾病。使工作者在工作的同时达到锻炼的目的。移动显示器支持系统适用于长期使用电脑的办公人员,并可推广到智能电视支持系统、办公桌支持系统。 3、屏幕支持系统的未来 目前国内外在移动显示器支持系统方面的研究尚停留在仅用于调节显示器摆放姿态的显示器支架阶段,但是这些支架承载力小,安装不方便,只限于手动调节,成本高。不适于广泛推广。借助于目前并联机器人技术的广泛应用及各方面的优点,本系统将有广阔的发展和应用前景。








