














搜索

作品简介: 在我国,石油、化工、煤炭等行业有毒气体泄漏时有发生,这些灾难发生后,现场环境具有复杂性和危险性。 为降低现场探测时对检测人员的伤害,并实现对事故现场的远程监控,设计了基于ARM 9的有害气体监测机器人。 此机器人可用于对工业现场有害气体浓度、环境温度等参数进行巡检,拍摄现场的实时视频画面,通过无线传输功能,能够将现场的数据实时传送给指挥中心。

作品简介: 轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持遥控器对机器人移动及摄像头云台进行控制,将获得的传感器数据及视频实时传至手持遥控器及上位计算机平台。

作品简介: 本文通提出了一种新型Thunder-3(雷霆-3)仿生多履带机器人的结构设计方案。该款机器人属于新型的便携式履带机器人。机械人本身具有三大创新性设计:一、首例提出机器人自动换手库设计,实现复杂环境下自动换手操作;二、采用六履带设计(前后双鳍状肢履带),提高机器人机动性能;三、仿生双机械设计,实现双手协同作业。

作品简介: 我国蔬菜瓜果种植过程中嫁接需求量大且因季节原因集中短期内作业因此劳动强度巨大,在劳动力成本持续升高的今天机械化自动嫁接已成为趋势。本项目接合我国蔬果种植特点研制出了适合多种蔬果的嫁接机器人,其嫁接速度最高可达720株/小时且嫁接成功率大于92%,其速度是手工嫁接的三倍以上,以三倍于人工嫁接的速度计算,自动嫁接可为嫁接环节省去60%以上的劳动力。产品目前处于中试阶段,其推广前景优良。

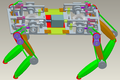
作品简介: 本上肢康复训练机器人用于中风偏瘫患者的康复训练。采用穿戴式外骨骼设计,由气动驱动。该机器人既能直接准确地模拟手臂的各种运动,又能利用患者的一侧健康手臂自主运动信息直接驱动患者另一侧患肢作随动康复运动。 康复训练上能轻松实现患者上肢的被动(全助力)、半主动(半助力)、主动(阻力)、随动及其组合训练模式。 利用本机器人,中风偏瘫患者可在社区医院或家庭进行个性化康复训练。

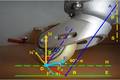
作品简介: 本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。

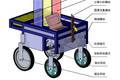
作品简介: 为对工业废渣、核安全事故现场放射性进行检测,团队设计了一款小型放射性检测机器人。本作品由运动平台和放射性检测单元两个部分组成。运动平台具有反应快、机动性强等优点,可适应多种路况;放射性检测单元包括测量存储数据的下位机硬件和分析处理数据的上位机软件,具有分辨率高、测量范围宽、准确度高等优点。该作品可在多种复杂环境中完成放射性物质的检测,为现代救援和灾后评估等提供了一个机电一体化的实用性设备。

作品简介: 针对现有水下航行器采用螺旋桨推进并以鳍舵进行操纵控制的运动方式无法满足在低速条件下具备较好的机动性和稳定性的需求,且功耗较大,航程不够远等特点,结合水下扑翼机器人和水下滑翔机而开发的一款仿海龟推进、采用扑翼推进并带滑翔功能的机器人。该机器人同时具备了上述两种新型水下航行器的高机动性、高效率、低功耗、远航程等特点,目前国内尚未见有此类机器人工程样机的报道。该机器人可用于海洋资源勘测与环境调查等方面。

作品简介: 作为救援破障类机器人,“祥龙”成功弥补了现有蛇形机器人普遍存在的工作环境单一、动力供应不足、耐高温性能差、翻倒无法复位等不足。 “祥龙”具有稳定性好、横截面小、柔性好、翻倒自适应、防水防尘、耐高温、可远程遥控等特点,可以在多种复杂地形上行走,在水、火中有较高工作能力,低廉的制造成本也为大规模应用提供了条件。在救援、探查、星球探测等方面具有广阔的应用前景。

作品简介: 本发明为一套可以应用于极限环境作业的新型主从式仿人机器人控制系统,包括一个外骨骼动作捕捉衣和一个履带式仿人机器人。操作者通过穿戴外骨骼动作捕捉衣,可以实时采集人体上身各关节运动数据,并利用wifi技术无线远程遥控仿人机器人。仿人机器人主体搭建在一个履带式移动平台上,可以实现机器人与操作者之间的视频音频等多媒体交互功能。该技术旨在利用机器人替代人类工作在危险环境中,完成复杂的操作任务,应用前景广阔。

作品简介: 本机器人使用移动互联网络通讯技术远程控制机器人,使机器人完成浇花,室内监控等工作。为经常出差,家里又无人照顾花草的人士解除后顾之忧。 由于通过互联网络通讯来控制机器人,使得遥控距离不受限制,只要有互联网环境就可以控制机器人完成工作。

作品简介: 本设计由一个十七个自由度构成的机器人。这款机器人可以模仿人的各种动作比如:行走、下蹲、倒立、翻跟头、俯卧撑等常规动作,还可以根据人的意愿随意设计各种舞蹈的整套动作;其次还可以以提示音的形式发声,这些功能可以借助启动按键来激活相应的程序模块,来控制一个可控制的数字录音扩展部件(事先录制好的语言)让机器人发声,还可以由机器人身体上的传感器实现自动循迹、导航等功能这些功能是正在研究并可以实现的功能。

作品简介: 本设计中的智能抢险探测机器人以ATMEL公司的ATMEGA16L单片机为控制核心,实现智能控制和智能救援,包括跨越“受损桥梁”、测量并计算桥梁高度、道路选择、智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、时间、高度显示等功能。

作品简介: 主动嗅觉机器人是根据仿生学原理,依靠自身电子鼻对运动轨迹上的多个点气体浓度进行检测,根据检测结果结合搜寻算法决定下一步的运动方向直至找到气源。主动嗅觉机器人技术能够解决爆炸物搜索、毒品检测、灾后搜救、火灾报警、危险气体检测等问题,具有广阔的应用前景。多功能远距离主动嗅觉机器人能够根据实际环境,装载不同的设备模块,切换搜索模式。在无线传感器网络和辅助机器人群的帮助下实现与控制基站的远距离通讯。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。

作品简介: 蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。

作品简介: 本项目旨在制造一个应用于深水井救援领域的救援机器人,以弥补该领域内专业救援设备的空白。 该机器人由六个模块组成,分别是无线控制模块、快速移动固定模块、定位模块、救援执行模块、时时通信及生命支持模块。本机器人体积小,活动灵活,能在狭窄的井中进行多种操作,完成在狭窄空间内人所很难或不可能完成的任务。在使用本装置实施救援时,消防员只需在地面上进行远程控制便能快速完成救援任务。
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。
