














搜索

作品简介: 在过去十余年间,餐饮业发展速度远远超过GDP的发展水平,常年保持在年增长率20%以上。目前,餐饮服务业使用的机器人在国内外基本尚未出现,在中国乃至世界,机器人在社会服务行业代替人类工作领域的研究基本上是一个空缺。因此,机器人应用于服务业具有十分重要的意义和推广应用价值。它实现同时为多个桌子智能自动送物和收物,还具有人性化的语音提示等功能。创新点:首创;效益高;实用性强,效率高;成本较低等。

作品简介: 针对现有教学型模拟驾驶器和开发型模拟驾驶器研究的缺点,本文构建一套车辆运行状态数据可导出的模拟驾驶系统,为研究“人- 车-路”闭环系统的特性提供数据来源;为基于车辆状态数据的驾驶员行为分析研究提供实验平台。

作品简介: 产品介绍: 本座椅的特点在于它可以随着人体的站立和坐下的动作来改变形 态。当人站起时,座椅自动上升弹起呈站立状态,供人倚靠,给人的 腰部一个支撑,使人在站立时身体也可以处于放松状态;当需要坐下 时,只需要下压座椅,便可以轻松坐下。站座椅能为工作时需长时间 站立或站坐动作交替的人群在需要站立的时候提供一个依靠,又能在 他们想坐下的时候方便快捷的让椅子改变形态来达到乘坐的目的。

作品简介: 该作品是基于电路基本原理的一个小型水位控制装置,主要有三部分组成。 1.水上装置。水上装置主要由电流放大元件三极管、电路控制元件电磁继电器、报警元件、LED灯、蜂鸣器和电路保护元件电阻等组成。 2.水上显示装置图。显示装置主要是由电流表改装的,通过一定比例关系就可以用来显示水位高度。 3.水下装置。水下装置主要由弹簧片、弧形电阻杆和浮子组成。

作品简介: 本作品抛弃了传统的操纵杆、键盘等人工控制方式,提出一种全新的控制理念,也就是用人的手臂和手部动作的变化来实现对可移动的多自由度机械手的无线控制,使操作简单、直观,并适用于一定复杂环境;另外,本作品还装配了用于监控的无线摄像头,进一步扩大了本作品的适用范围,与此同时,本作品增加了目标自动定位功能,实现了一定的智能化,进一步提高了工作效率,达到了一定程度的人工与智能相结合。 本作品验证了用...

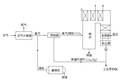
作品简介: 随着电力行业的发展和电力网络监控的要求,现在的电量表不仅要对三相电压、电流的真有效值、功率等基本参数进行精确测量或计量,而且要求在各个测量节点能够现场处理测量信息和进行网络联网与数字通信。 系统主要由三部分组成:三相电电量表、三种标准现场总线通讯模块和上位机监测软件。电量表采用了低成本高可靠性解决方案;现场总线通讯模块按照国际标准协议进行开发;上位机软件使用LabVIEW进行开发,兼容三种总线协...

作品简介: 综合利用浮空器的静浮力和飞机升力面的动升力,提出了一种将传统飞艇和飞机有机结合的新概念浮升式双体飞行器。该飞行器具有巡航时间长、机动性好、环保节能、有效载荷大、安全冗余度高等优点,将之大型化后可用作临近空间飞行器,有许多潜在的军事和民用用途,如高空长航时侦察、大型设备货物运输、武器发射平台、科学研究、电子干扰与无线电中继等。

作品简介: 该远程无线反恐机器人是基于Intel Core Duo双核和研祥EC5-1719CLDNA单板电脑研发而成。它主要应用于危险环境及狭小区域的检测以及危险物品的排除,根据前方反馈的视频信息远程控制排爆作业,使排爆人员的生命安全得以很好的保障。

作品简介: 钢轨损伤是影响铁路运行安全的重要因素。本作品针对现有的传统检测方法,如榔头敲击并结合经验判断等精度有限、效率低、往往漏检的问题,基于涡流检测原理,设计制作了一种巡道工人使用的日常检测探伤仪器,具有实用性强、灵敏便携、价格低廉等优点,可在铁路系统中推广应用。

作品简介: 本作品主要针对没有音乐基础的业余人士设计,以减小钢琴入门及学习的难度为目的,同时有助于五线谱的学习和手感的建立,能有效提高学习效率和成功率。作品提出的学习的方式突破了常规的钢琴学习模式,将科学与艺术相结合,对于艺术的普及和社会精神文化水平的提高有一定的作用。

作品简介: 在液压支架制造企业的生产中,采用A型模拟式超声探伤仪,以传统的手动方式检测液压缸对接环焊缝质量,存在效率低、可靠性差等问题。为了克服手动超声检测方式的缺点和不足,保证焊接质量,研制了一种液压支架缸体环焊缝缺陷超声自动检测系统,实现了液压缸环焊缝检测的自动化、数字化和图像化,提高了超声检测的可靠性和效率。

作品简介: 作品以井下及危险环境的探测与搜救为背景,设计开发出一种可适应不同路面条件的新型关节—履带复合式智能机器人。机器人由机械本体、控制单元、信息采集模块、数据远程传输及处理模块等组成,通过CCD及多种传感器的实时信息采集,实现路径自主选择及环境数据探测。
作品简介: 为了降低电站锅炉的整体燃料消耗或部分替代贫乏燃料,本文提出了一个基于富氧点火系统的煤粉锅炉点火装置。小煤粒适用于该系统。这种新型燃烧器包括内、外和中套管,采用内、外套管与中套管双重换热技术。富氧燃烧器已批准一项发明专利。实验研究和数值模拟分析验证了理论的可行性。研究表明:它可以提高最大燃烧速度和平均燃烧速度,并减少煤粉燃烧的着火温度和燃尽温度。此外,煤粉燃烧更容易点燃和全面改善综合燃烧特性指数。

作品简介: 本系统旨在为老年人和慢性疾病人群提供实时、持续的体征监测。便携式体征监护子系统,实现生理数据(体温、心电、脉搏)的采集、显示、存储及再现等功能,具有体积小、功耗低、实时监护、用户定位、短信报警等特点。分布式体温监护子系统,主要对病区病人体温的集中监测,减少了护士的工作量;可以实现数据的远程访问,便于医生对病情的异地诊断。

作品简介: 本项目是一台履带式双机械臂机器人,主要可执行地震救援、排爆、特殊环境检测和侦查等危险工作。双机械臂采用电动推杆驱动,单臂负载力达到30kg。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,攀爬30°斜坡。利用机器人运动学方程的正、逆解,结合控制算法解决了双臂干涉问题。采用拟人化的控制方式,提高机器人可控性。

作品简介: 轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持遥控器对机器人移动及摄像头云台进行控制,将获得的传感器数据及视频实时传至手持遥控器及上位计算机平台。

作品简介: 作品应用激光打靶机的理论与方法,在机械式裂缝三向变形测量仪的基础上进行改进、创新,立足于西安地裂缝的工程实际,突破现有技术瓶颈,自行设计与制作电路,将现有的激光测距仪技术与光电技术结合,不仅实现了传统技术与前沿技术的整合,而且在一定程度上完成了光电学与地质学跨学科的技术突破。

作品简介: 本作品通过对地震后灾区道路破坏形式和交通特征的调查分析,提出了震后道路的应急抢修方案,优选轻质高强的玻璃纤维环氧树脂材料,设计了一种结构轻盈、适用范围广、施工快捷、可储备重复利用的格栅-土石式应急路面板。运用有限元方法,对这种应急路面板在不利荷载工况下的受力状态进行了数值模拟分析,验证其结构强度的可靠性。同时,对应急路面板的施工工艺展开了相应研究,以最大程度地提高灾区道路抢修的时效性。

作品简介: 针对设施农业中定光强、定光质补光方法的不足,基于光合作用机理分析,提出实时环境监测、特定波段补光与定量决策相结合的精确补光方法,设计了与作物生长过程相适应的智能补光系统。作品考虑温度、二氧化碳对补光效果的影响,根据作物各阶段特征动态调整目标光强,采用实时红蓝光光强与目标光强的差值计算补光量,通过PWM调整LED输出光强,实现精确按需补光。实际应用表明,作品实现了智能化、精确化、低能耗补光。

作品简介: 本项目设计制造了一种高层建筑双向逃生装置,其基本原理是利用钢绳两端交替上下运动实现双向逃生。该装置采用离心摩擦制动,结构简单,具有良好的实用性和经济性。逃生器固定在阳台顶部或侧墙上部,便于安装存放;使用时可迅速转变为工作状态。
