














搜索

作品简介: 本作品以核磁共振环境下近距离粒子放射治疗手术机器人为对象,涉及医疗器械领域,属于机械控制与医学交叉的前沿学科。研究了机器人材料和驱动方式的选择、结构设计、运动学分析与验证、控制系统设计、视觉采集系统搭建等方面内容,辅助针刺轨迹优化及软组织动态仿真等相关项目的研究,并成功运用于仿生软组织针刺试验验证。
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。

作品简介: 本研究以光谱信息融合理论为核心,开发了一套可以测试氨氮和亚硝酸盐含量的多光谱新型水质分析仪。该水质分析仪通过对少量水质样品的光谱测量分析能够自动完成水样化合物测定、显示、存储全过程。该仪器能够快速检测水中氨氮、亚硝酸盐的含量,实际测量结果表明该检测设备,误差小,测量精确,具有一定创新性。广泛应用于水产养殖业,同时也适用于生活污水和湖泊地表水的自动检测。

作品简介: 随着城市轨道交通的蓬勃发展,对其配套设施的研究也越来越迫切了。 本作品基于如何设计布局合理、安全高效的物资配送系统这个问题出发,详细地分析了影响地铁交通线网物资配送系统的影响因素,并创新性地从多线共用物资总库角度出发建立物资供应模式,建立了物资配送的总体规划模型。最后,本作品运用Matlab软件开发出辅助决策工具——城市地铁线网物资配送系统。

作品简介: 同轴双阴极五元素阴极灯能同时1次测量得到血液中五种元素的含量,经典的空心阴极灯需要5次测量才能够得到血液中五种元素的含量。本方法测量方便快捷,节省血样,解决的关键科技问题是每测量一个元素换一个灯的问题。1滴血1次测量得到血液中5五种元素的含量,经典的空心阴极灯需要5滴血5次测量得到血液中5种元素的含量。

作品简介: 针对目前井下监控系统监测信息量少、精度差、无法了解井下详细信息、不能及时反馈等问题,作品利用嵌入式技术、测控技术、数据融合技术、瓦斯预测技术等手段,以新的数据获取和分析处理方式,将井下监测信息浓缩于一掌之中,实现传感器信息数据融合、瓦斯预测、环境参数监测、风量监测、供电监测、断电控制等功能,作品具有良好的可靠性和安全性,有效防止事故灾害的扩大,具有很好的社会效益和经济效益。

作品简介: 本莲子去芯机是前年受花石某莲子加工企业委托后,课题组经过长时间的设计与制造于去年六月份试制成功的一款纯机械式的全自动莲子去芯机,本机器的使用成本仅为人工成本的1/10,效率为人工的3倍以上,且经久耐用。去年年底在花石展览中,得到了当地企业家的充分肯定。现场签约50台,现已制造交货完全。在产品全面推广的情况下,预计以后每年可为当地社会创造价值500万左右。

作品简介: 为对工业废渣、核安全事故现场放射性进行检测,团队设计了一款小型放射性检测机器人。本作品由运动平台和放射性检测单元两个部分组成。运动平台具有反应快、机动性强等优点,可适应多种路况;放射性检测单元包括测量存储数据的下位机硬件和分析处理数据的上位机软件,具有分辨率高、测量范围宽、准确度高等优点。该作品可在多种复杂环境中完成放射性物质的检测,为现代救援和灾后评估等提供了一个机电一体化的实用性设备。

作品简介: 酒后驾车的交通事故发生率比正常情况下高出16倍。但是传统测量方式只能被动的依靠交警来进行,这给一部分人带来了侥幸心理,逃避检测,随之产生了严重的安全隐患。此作品将电子技术、无线电通讯技术应用于交通事故的自动呼救,结合GPS的定位功能和GSM的远程无线通讯功能,提出一种以提高交通安全、减少人员伤亡为目的的车辆交通事故自动呼救系统的构建方案。

作品简介: 本作品针对新疆棉花生产急需配套的打顶机械,在原有研究的基础上,研发了滑道式的组合机架、齿带组合的柔性传动的系统、机械浮动板信号触发器、蓄压式的液压升降系统等核心部件,较好解决了作业行距可调、割刀独立升降的动力传动、棉株顶部高度特征信号的采集与传送、割刀升降响应速度等技术问题,2010年制作加工的首轮样机田间试验表明:该机实现了棉株行内、行间的独立仿形打顶作业,满足了棉花打顶的技术要求。

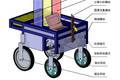
作品简介: 通过轮腿式载运平台的设计,可以大大改善目前的装备运输平台不能满足战场环境日益复杂化对多适应性作战平台的需求,提升我军在多种复杂战场环境下的有效战斗载荷,提升部队综合战斗力;在民用方面,可以有效克服复杂环境下的运输,探测等传统性难题,为新一代智能化多适应性机器人的开发提供新的思考。

作品简介: 本作品涉及一种无缝铁路应力放散方法及其设备,以实现铺设或维护无缝铁路时,使其拉应力均匀化,达到锁定轨温的目的。设备主要由行走小车,冲击单元,夹紧装置以及检测控制系统四部分组成。根据激振理论,用冲击式气液增压缸周期性地撞击钢轨,利用振动波传递能量来实现温度应力式无缝铁路的纵向应力放散,并使其应力均匀化;用检测控制系统实时监控钢轨应力状态,以完成标定的应力放散作业。

作品简介: 建筑施工领域的打桩机分重力锤式和柴油锤式两种。前者落锤沉重,整机庞大,不便运输;后者以柴油爆燃为动力,噪声大、尾气排放严重,不符合未来施工“节能减排,绿色低碳”的趋势。为保证桩机行业的可持续发展,本作品采用新型的电磁弹射技术加速落锤。通过已制作完成的样品可看到,此种电磁加速式打桩机拥有无噪声污染、无尾气排放;动力来源(市电)清洁绿色;操作性、可控性好;制造和使用成本低等诸多优点。

作品简介: 高速焊时易发生电弧后拖,引起焊缝严重咬边、驼峰等成形不良问题。为了解决上述问题,我们研制了一种新型电磁控制设备。通过该设备将磁场引入电弧区以改善电弧形态,从而使TIG焊接电弧在挺直的状态下工作,最终实现提高焊接速度、改善焊缝成形不良、提高焊接质量的目的。设备适用于薄板或薄壁管件的焊接。已在国内某企业不锈钢焊管生产线上成功应用,其焊接速度从0.4m/min提高到5.5m/min,提高了10倍以上。

作品简介: 针对现有水下航行器采用螺旋桨推进并以鳍舵进行操纵控制的运动方式无法满足在低速条件下具备较好的机动性和稳定性的需求,且功耗较大,航程不够远等特点,结合水下扑翼机器人和水下滑翔机而开发的一款仿海龟推进、采用扑翼推进并带滑翔功能的机器人。该机器人同时具备了上述两种新型水下航行器的高机动性、高效率、低功耗、远航程等特点,目前国内尚未见有此类机器人工程样机的报道。该机器人可用于海洋资源勘测与环境调查等方面。

作品简介: 为应对我国可吸入颗粒物污染严重这一现状研发的这款用于监测室内、车内等人居环境可吸入颗粒物浓度的装置。该装置基于可吸入颗粒物的光散射性,利用光强与颗粒物浓度之间的关系,进行光电转换,进而获得了可吸入颗粒物的浓度。具有实时显示浓度、超标报警、超标10%控制相应装置降尘,同时具有远程传输功能。该装置的研发成功,对于净化环境、保护人类身体健康具有重要意义,具有广阔的推广价值和应用前景。

作品简介: 核桃在我国分布极为广泛,因其营养丰富,越来越为人们所重视。根据我国核桃国家标准规定,须将核桃按体积大小和质量轻重分为优级、一级、二级三个等级。全自动核桃(板栗)动态称重分选机是集自动上料、体积分选、分料、动态称重于一身的机电一体化作品,旨在完成对核桃的品质分选和次品核桃的准确剔除。

作品简介: 作为救援破障类机器人,“祥龙”成功弥补了现有蛇形机器人普遍存在的工作环境单一、动力供应不足、耐高温性能差、翻倒无法复位等不足。 “祥龙”具有稳定性好、横截面小、柔性好、翻倒自适应、防水防尘、耐高温、可远程遥控等特点,可以在多种复杂地形上行走,在水、火中有较高工作能力,低廉的制造成本也为大规模应用提供了条件。在救援、探查、星球探测等方面具有广阔的应用前景。

作品简介: 高压电传输终端开关柜的正常运行无疑是电能安全传输的命脉。传输终端高压开关柜经常会因内部触头接触不良,接触电阻增大,出现触头温升过高,最终导致烧毁停电,甚至导致重大安全事故的发生。为了有效避免此类事故的发生,我们开发了一种能即时监测触头温升并将开关柜的运行状况实时的显示在PC机上还可以通过互联网远程查询开关柜的运行状况的基于红外数据通信的电力高压开关柜温度采集和远程监控系统。

作品简介: 该项目设计了一种基于OMAP-L138嵌入式平台的手指静脉身份认证系统,利用模糊控制算法对采集装置光源进行分组PWM控制,采用近红外成像技术通过对手指静脉特征成像进行身份认证,具有速度快、精度高、性能可靠、信息安全性高等优点,能够准确地进行身份认证。
